《(決勝中考)中考物理 分類解讀與強化訓(xùn)練 專題六 動態(tài)杠桿分析(含解析) 新人教版》由會員分享����,可在線閱讀�,更多相關(guān)《(決勝中考)中考物理 分類解讀與強化訓(xùn)練 專題六 動態(tài)杠桿分析(含解析) 新人教版(34頁珍藏版)》請在裝配圖網(wǎng)上搜索。
1����、
專題六 動態(tài)杠桿分析
杠桿問題是我們生活實踐中常見問題,廣泛應(yīng)用于各種機器�、機械,在生活中應(yīng)用也很廣泛��。初中物理關(guān)于杠桿的動態(tài)變化問題是學(xué)生學(xué)習(xí)的難點��,也是中考試題中的難點和重點并在中考中占有一定比例。
動態(tài)杠桿分析主要涉及以下三個方面:最小力問題�����、力與力臂變化問題����、再平衡問題。
動態(tài)杠桿分析離不開杠桿的平衡條件:����,即動力×動力臂=阻力×阻力臂。
提升重物時�,公式為:,動力為:�。
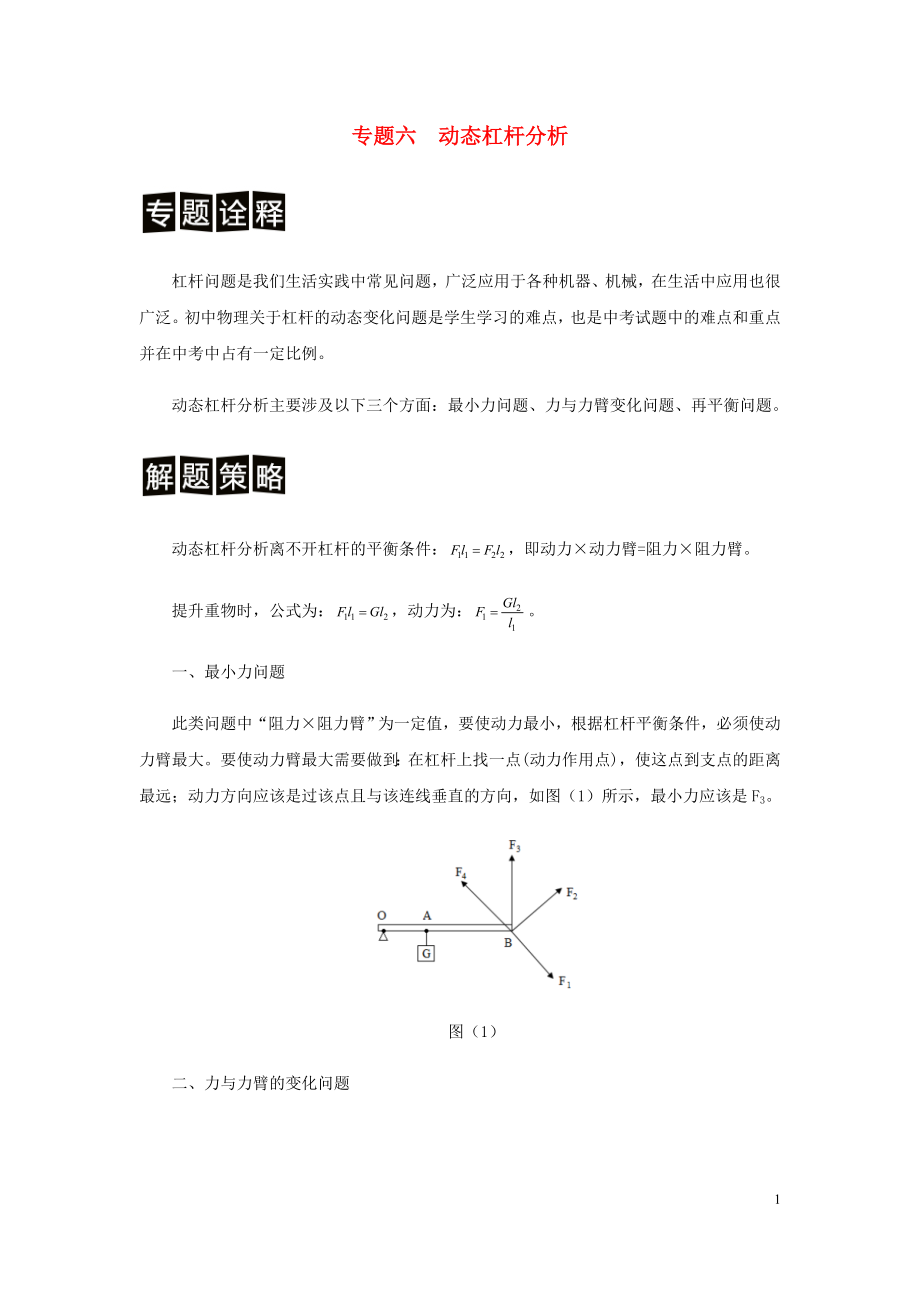
一、最小力問題
此類問題中“阻力×阻力臂”為一定值��,要使動力最小���,根據(jù)杠桿平衡條件,必須使動力臂最大����。要使動力臂最大需要做到:在杠桿上找一點(動力作用點),使這點到支點的距離最遠�;動力方向應(yīng)
2�、該是過該點且與該連線垂直的方向����,如圖(1)所示,最小力應(yīng)該是F3����。
圖(1)
二、力與力臂的變化問題
此問題是在力與力臂變化時�����,如何利用杠桿平衡條件和控制變量法��,分析變量之間的關(guān)系��。如圖(2)所示����,在探究杠桿平衡條件實驗時,當(dāng)拉緊的彈簧測力計向左轉(zhuǎn)動時�,拉力的變化情況是會逐漸減小。
三�����、再平衡問題
杠桿再平衡的問題,實際上就是判斷杠桿在發(fā)生變化前后���,力和力臂的乘積是否相等�,乘積大的一端下降��,乘積小的一端上升��。
圖(2)
圖(3)
如圖(3)所示�����,杠桿處于平衡狀態(tài)����,如果將物體A和B同時向靠近支點的方向移動相同的距離,杠桿將失去平衡�,右端下沉。
一���、杠桿
1.什
3、么是杠桿:在力的作用下能繞著固定點轉(zhuǎn)動的硬棒����,這根硬棒就叫杠桿���。
(1)“硬棒”泛指有一定長度的,在外力作用下不變形的物體��。
(2)杠桿可以是直的���,也可以是任何形狀的�。如圖(4)所示����。
2.杠桿的七要素(如圖(5)所示)
圖(4)杠桿
圖(5)杠桿的七要素
(1)支點:杠桿繞著轉(zhuǎn)動的固定點,用字母“O”表示�����。它可能在棒的某一端����,也可能在棒的中間,在杠桿轉(zhuǎn)動時�����,支點是相對固定;
(2)動力:使杠桿轉(zhuǎn)動的力叫動力�����,用“F1”表示�����;
(3)阻力:阻礙杠桿轉(zhuǎn)動的力叫阻力����,用“F2”表示;
(4)動力作用點:動力在杠桿上的作用點�;
(5)阻力作用點:阻力在杠桿上的作用點;
4�、(6)動力臂:從支點到動力作用線的垂直距離,用“”表示�;
(7)阻力臂:從支點到阻力作用線的垂直距離,用“”表示����。
注意:無論動力還是阻力,都是作用在杠桿上的力�����,但這兩個力的作用效果正好相反�。一般情況下,把人施加給杠桿的力或使杠桿按照人的意愿轉(zhuǎn)動的力叫做動力�����,而把阻礙杠桿按照需要方向轉(zhuǎn)動的力叫阻力�。
力臂是點到線的距離��,而不是支點到力的作用點的距離����。力的作用線通過支點的�,其力臂為零,對杠桿的轉(zhuǎn)動不起作用�����。
3.杠桿示意圖的畫法(如圖(6)所示):(1)根據(jù)題意先確定支點O�;
(2)確定動力和阻力并用虛線將其作用線延長;
甲
乙
丙
圖(6)杠桿的示意圖
(3)從
5�、支點向力的作用線畫垂線,并用l1和l2分別表示動力臂和阻力臂����;
第一步:先確定支點����,即杠桿繞著某點轉(zhuǎn)動���,用字母“O”表示�。
第二步:確定動力和阻力����。人的愿望是將石頭翹起,則人應(yīng)向下用力�����,畫出此力即為動力用“F1”表示�����。這個力F1作用效果是使杠桿逆時針轉(zhuǎn)動���。而阻力的作用效果恰好與動力作用效果相反����,在阻力的作用下杠桿應(yīng)朝著順時針方向轉(zhuǎn)動�,則阻力是石頭施加給杠桿的��,方向向下,用“F2”表示如圖乙所示����。
第三步:畫出動力臂和阻力臂��,將力的作用線正向或反向延長�����,由支點向力的作用線作垂線���,并標(biāo)明相應(yīng)的“l(fā)1”“l(fā)2”, “l(fā)1”“l(fā)2”分別表示動力臂和阻力臂�����,如圖丙所示�。
4.杠桿的平衡條件
(
6、1)杠桿的平衡:當(dāng)杠桿在動力和阻力的作用下靜止時�,我們就說杠桿平衡了。
(2)杠桿的平衡條件實驗
圖(7)
圖(8)
1)首先調(diào)節(jié)杠桿兩端的螺母�����,使杠桿在水平位置平衡。如圖(8)所示�����,當(dāng)杠桿在水平位置平衡時���,這樣就可以由杠桿上的刻度直接讀出力臂實物大小了�����,而圖(7)杠桿在傾斜位置平衡�,讀力臂的數(shù)值就沒有圖(8)方便���。由此����,只有杠桿在水平位置平衡時�����,我們才能夠直接從杠桿上讀出動力臂和阻力臂的大小����,因此本實驗要求杠桿在水平位置平衡���。
2)在實驗過程中絕不能再調(diào)節(jié)螺母。因為實驗過程中再調(diào)節(jié)平衡螺母�����,就會破壞原有的平衡����。
(3)杠桿的平衡條件:動力×動力臂=阻力×阻力臂�,或F1l1
7、=F2l2�����。
5.杠桿的應(yīng)用
(1)省力杠桿:動力臂l1>阻力臂l2����,則平衡時F1<F2,這種杠桿使用時可省力(即用較小的動力就可以克服較大的阻力)�����,但卻費了距離(即動力作用點移動的距離大于阻力作用點移動的距離,并且比不使用杠桿���,力直接作用在物體上移動的距離大)���。
(2)費力杠桿:動力臂l1<阻力臂l2,則平衡時F1>F2����,這種杠桿叫做費力杠桿。使用費力杠桿時雖然費了力(動力大于阻力)����,但卻省距離(可使動力作用點比阻力作用點少移動距離)。
(3)等臂杠桿:動力臂l1=阻力臂l2�,則平衡時F1=F2,這種杠桿叫做等臂杠桿�。使用這種杠桿既不省力,也不費力����,即不省距離也不費距離。
既省力又
8����、省距離的杠桿時不存在的���。
一、最小力問題
【典例1】(2018·東營)如圖所示,杠桿AOB能繞O點轉(zhuǎn)動����。在A點掛一重物G,為使杠桿保持平衡且用力最小����,在B點施加一個力,這個力應(yīng)該是圖中的_________���。
【解析】在B點施力F,阻力的方向向下���,為使杠桿平衡�����,動力的方向應(yīng)向下�,F(xiàn)4方向向上�,不符合要求;
當(dāng)F的方向與杠桿垂直時動力臂最大,此時最省力�,即F2的方向與OB垂直,故F2最小���。
故答案為:F2����。
二、力與力臂變化問題
【典例2】(2018?玉林)如圖所示�����,長為40cm����、重為10N的勻質(zhì)杠桿可繞著O點轉(zhuǎn)動,作用在杠桿一端且始終與杠桿垂直的力F����,將杠桿緩慢地由與水平方
9�����、向夾角為30°的位置拉至水平位置(忽略摩擦阻力),在這個過程中��,力F的大小將 ?。ㄟx填“增大”����、“不變”或“減小”)���,力F所做的功為 J。
【解析】(1)根據(jù)杠桿平衡條件來做出分析����;(2)根據(jù)h=Lsin30°求出物體重心上升的高度���,再根據(jù)W=Gh求出克服重力做的功�,即為拉力做的功���。
【解答】(1)在杠桿緩慢地由與水平方向夾角為30°的位置拉至水平位置的過程中��,動力臂L的長度沒有變化,阻力G的大小沒有變化,而阻力臂L卻逐漸增大����;
由杠桿的平衡條件知:F?L=G?L′����,當(dāng)L���、G不變時�����,L′越大���,那么F越大,因此拉力F在這個過程中逐漸增大����;
(2)物體重心上升的高度h=Lsin3
10���、0°=×40cm×=10cm=0.1m,
拉力做的功W=Gh=10N×0.1m=1J����。
故答案為:增大�����;1����。
三�����、再平衡問題
【典例3】(2018·濰坊)如圖所示�,杠桿處于平衡狀態(tài)。如果杠桿兩側(cè)的鉤碼各減少一個��,杠桿將( ?。?。
A.左端下降 B.右端下降 C.仍然平衡 D.無法判斷
【解析】圖中杠桿處于平衡狀態(tài)���,設(shè)一個鉤碼的重為G,杠桿上一格的長度為L����,根據(jù)杠桿平衡條件可得:2G×3L=3G×2L����;如果杠桿兩側(cè)的鉤碼各減少一個,則:左邊力與力臂的乘積:1G×3L���,右邊力與力臂的乘積:2G×2L���,由于此時右邊力與力臂的乘積較大,所以右端下降����。故選B�����。
一����、
11��、最小力問題
1.(2018·龍東)如圖所示的簡單機械中一定費力的是( ?���。?
A.起瓶器 B.撬棒
C.羊角錘 D.釣魚竿
【解析】A����、起瓶器在使用過程中,動力臂大于阻力臂�,是省力杠桿,故A錯誤���;
B.撬棒在使用過程中���,動力臂大于阻力臂,是省力杠桿����,故B錯誤���;
C、羊角錘在使用過程中�����,動力臂大于阻力臂���,是省力杠桿�����,故C錯誤;
D����、釣魚竿在使用過程中,動力臂小于阻力臂�,是費力杠桿,故D正確���。
故選D�。
2. (2018·海南)如圖所示,下列工具在使用中屬于省力杠桿的是( )���。
【解析】A�����、筷子使用時�,動力臂小于阻
12���、力臂是費力杠桿�����,故A不符合題意����;
B�、釣魚竿使用時,動力臂小于阻力臂是費力杠桿���,故B不符合題意�;
C、鋼絲鉗翦斷鋼絲時�,動力臂大于阻力臂是省力杠桿,故C符合題意�;
D、食品夾使用時�����,動力臂小于阻力臂是費力杠桿��,故D不符合題意�����;
故選C���。
3.(2018·齊齊哈爾)如圖所示的用具���,在正常使用的過程中,屬于費力杠桿的是(?�。?����。
A. B. C. D.
【解析】杠桿的分類主要包括以下幾種:①省力杠桿�,動力臂大于阻力臂;②費力杠桿����,動力臂小于阻力臂;③等臂杠桿����,動力臂等于阻力臂。
A�����、圖示剪刀��,在使用過程中����,動力臂大于阻力臂,是省力杠桿����;
B、鋼絲鉗在使用過程中����,動力臂大于阻力臂��,是
13����、省力杠桿���;
C�、圖示剪刀�����,動力臂小于阻力臂�����,是費力杠桿����;
D、獨輪車在使用過程中�����,動力臂大于阻力臂����,是省力杠桿。
故選:C����。
4.(2018·貴陽)人們應(yīng)用不同的簡單機械來輔助工作,正常使用下列簡單機械時說法正確的是( ?��。?����。
A.筷子可以省距離 B.所有剪刀都一定省力
C.定滑輪可以省力 D.撬棒越短一定越省力
【解析】A���、用筷子夾菜時,動力臂小于阻力臂����,所以是一個費力杠桿,費力但省距離����,故A正確�;
B���、剪鐵皮用的剪刀���,在使用過程中,動力臂大于阻力臂����,是省力杠桿;
理發(fā)用的剪刀�,在使用過程中,動力臂小于阻力臂���,是費力杠桿���;
所以,剪刀有省力的�����,也有費力的���,故B錯誤�����;
C
14�、����、定滑輪在使用過程中,動力臂等于阻力臂����,是等臂杠桿,不省力�,故C錯誤;
D���、撬棒在使用過程中�,動力臂大于阻力臂����,是省力杠桿��;在其它條件不變時�����,省力的多少取決于動力臂的長短,撬棒越短動力臂越小���,越費力��,故D錯誤����。
故選A����。
5.(2018?湖州)一根均勻的長方體細長直棒重1.5牛,下底面積為20厘米2���,將它放在水平桌面上��,并有的長度露出桌面外���,如圖所示。在棒的右端至少應(yīng)施加 牛的豎直向下的力�,才能讓它的左端離開桌面。
【解析】確定支點�����,壓力為動力,棒的重力為阻力���,根據(jù)杠桿的平衡條件進行分析���,且要使力最小���,需使動力臂最長���。
【解答】在棒的右端施加力,使左端抬起���,此時直棒相當(dāng)于杠桿
15�、���,支點在桌邊��,根據(jù)杠桿的平衡條件�,要使動力最小���,應(yīng)該使動力臂最長����,所以應(yīng)在最右端施加一個豎直向下的力,如圖所示:
設(shè)直棒的長為L�,由題知L1=L,重力的力臂L2=﹣=L���,
根據(jù)杠桿的平衡條件可得:F?L1=G?L2���,
即:F×L=1.5N×L,解得:F=1.5N���。
故答案為:1.5���。
6.(2018?瀘州)瀘州市為了鞏固創(chuàng)文成果下發(fā)了宜傳手冊“綠色低碳生活,從垃圾分類開始”���。如圖是一種輪式垃圾桶���,拖動時它相當(dāng)于一個 杠桿(選填“省力”或“費力”);垃圾桶底部的小輪子是為了 摩擦力(選填“增大”或“減小”);若拖動時垃圾桶總重為150N�����,且動力臂為阻力臂的2倍�����,則保持
16����、垃圾桶平衡的拉力F為 N。
【解析】(1)由示意圖分析動力和阻力�,然后看動力臂和阻力臂的大小�,確定杠桿種類;(2)用滾動代替滑動可以減小摩擦��;(3)根據(jù)杠桿的平衡條件進行計算求出豎直向上的力�����。
【解答】(1)圖示的垃圾桶�����,因為是動力臂大于阻力臂的杠桿,所以是一個省力杠桿�;
(2)垃圾桶底部安裝小輪子,采用變滑動為滾動的方式減小了摩擦力����;
(3)已知垃圾桶總重G=150N,動力臂L1=2L2���,
根據(jù)杠桿平衡條件:FL1=GL2可得����,
保持垃圾桶平衡的拉力為:F===75N���。
故答案為:省力�;減?���。?5����。
7.(2018·德陽)如圖OAB輕質(zhì)杠桿,O為支點,請在圖中B點處
17、畫出能使杠桿保持平衡的最小力F的示意圖�����。
【解析】(1)根據(jù)杠桿平衡的條件可知,在杠桿中的阻力��、阻力臂一定的情況下�����,要使所用的動力最小�����,必須使動力臂最長���;(2)在通常情況下���,連接杠桿支點和動力作用點這兩點所得到的線段最長���,依此為動力臂�,最省力���。
【解答】(1)由O點到桿頂端的距離是最長的力臂�����,所以動力應(yīng)作用在杠桿的頂端B處����;
(2)根據(jù)杠桿平衡的條件,要使杠桿平衡�����,動力方向垂直于桿向上����,據(jù)此可畫出最小的動力,如圖所示:
8.(2018·安徽)圖a所示為前臂平伸用手掌拖住鉛球時的情形�。我們可將圖a簡化成如圖b所示的杠桿。不計自重��。若鉛球質(zhì)量m=3kg�����,OA=0.03m�,OB=0.
18、30m�����,求此時肱二頭肌對前臂產(chǎn)生的拉力F1大小(g取10N/kg)��。
【解析】肱二頭肌對前臂產(chǎn)生的拉力F1為動力��,3kg鉛球的重力即為阻力F2�,利用杠桿的平衡條件求肱二頭肌的收縮力。
解答:由圖可知�����,支點是O點���,肱二頭肌對前臂產(chǎn)生的拉力F1為動力�����,3kg鉛球的重力即為阻力F2�����,則阻力:,由圖知���,L1=OA=0.03m���,L2=OB=0.30m�����,根據(jù)杠桿的平衡條件:���,即:,解得F1=300N�。
答:肱二頭肌對前臂產(chǎn)生的拉力F1為300N。
9.(2018·福建A)《墨經(jīng)》最早記述了秤的杠桿原理���,如圖中“標(biāo)”“本”表示力臂�����,“權(quán)”“重”表示力�,以下說法符合杠桿平衡原理的是( )�。
19、
A.“權(quán)”小于“重”時��,A端一定上揚�����;
B.“權(quán)”小于“重”時,“標(biāo)”一定小于“本”���;
C.增大“重”時���,應(yīng)把“權(quán)”向A端移;
D.增大“重”時���,應(yīng)更換更小的“權(quán)”
【解析】A.根據(jù)杠桿平衡條件����,“權(quán)”小于“重”時����,因為不知道“標(biāo)”和“本”的大小關(guān)系,無法確定“權(quán)”和“標(biāo)”的乘積與“重”和“本”乘積的大小的關(guān)系����,故A錯誤。
B.根據(jù)杠桿平衡條件���,“權(quán)”小于“重”時��,“標(biāo)”一定大于“本”�,故B錯誤�。
C.根據(jù)杠桿平衡條件,“本”不變���,增大“重”時���,因為“權(quán)”不變,“標(biāo)”會變大����,即應(yīng)把“權(quán)”向A端移,故C正確����。
D.使用桿秤時,同一桿秤“權(quán)”不變����,“重”可變,不同的“重”對應(yīng)不同
20����、的“標(biāo)”�。若更換更小的“權(quán)”�,“標(biāo)”也會變得更大,不符合秤的原理����,故D錯誤�����。
答案為C。
10.(2018·眉山)如圖所示�,輕質(zhì)杠桿OA能繞O點轉(zhuǎn)動,請在杠桿中的A端畫出使輕質(zhì)杠桿保持平衡的最小的力F的示意圖(要求保留作圖痕跡)����。
【解析】此題是求杠桿最小力的問題,已知點O是動力作用點����,那么只需找出最長動力臂即可,可根據(jù)這個思路進行求解�。
【解答】O為支點,所以力作用在杠桿的最右端A點�����,并且力臂是OA時,力臂最長�,此時的力最小。確定出力臂然后做力臂的垂線即為力F.如圖所示:
11.(2018·綿陽)如圖所示�����,兩個等高的托盤秤甲�、乙放在同一水平地面上����,質(zhì)量分布不均勻的木條AB
21、重24N�,A、B是木條兩端�,O、C是木條上的兩個點�����,AO=B0����,AC=OC.A端放在托盤秤甲上,B端放在托盤秤乙上,托盤秤甲的示數(shù)是6N.現(xiàn)移動托盤秤甲����,讓C點放在托盤秤甲上。此時托盤秤乙的示數(shù)是( ?����。?。
A.8N B.12N C.16N D.18N
【解析】A端放在托盤秤甲上,以B點支點����,根據(jù)杠桿平衡條件先表示出木條重心D到B的距離,當(dāng)C點放在托盤秤甲上C為支點�����,再根據(jù)杠桿平衡條件計算托盤秤乙的示數(shù)����。
【解答】設(shè)木條重心在D點,當(dāng)A端放在托盤秤甲上�����,B端放在托盤秤乙上時,以B端為支點�,
托盤秤甲的示數(shù)是6N,根據(jù)力的作用是相互的�����,所以托盤秤對木條A端的支持力為6
22����、N����,如圖所示:
由杠桿平衡條件有:FA×AB=G×BD,即:6N×AB=24N×BD�,
所以:AB=4BD,BD=AB����,
當(dāng)C點放在托盤秤甲上時,仍以C為支點�����,此時托盤秤乙對木條B處的支持力為FB����,
因為AO=BO�,AC=OC����,所以CO=OD=BD,BC=3BD�,CD=2BD
由杠桿平衡條件有:FB×BC=G×CD,即:FB×3BD=24N×2BD�����,
所以:FB=16N�,則托盤秤乙的示數(shù)為16N。
故選C�。
12. (2018·天津)利用圖甲中的撬棒撬石塊時,撬棒相當(dāng)于______(選填“省力”或“費力”)杠桿;利用圖乙中的滑輪組勻速提升900N的重物時,若忽略滑輪自重
23�����、�����、繩重及摩擦����,人對繩的最小拉力為______N����。
【解析】(1)結(jié)合圖片和生活經(jīng)驗�����,判斷杠桿在使用過程中����,動力臂和阻力臂的大小關(guān)系,再判斷它是屬于哪種類型的杠桿����。
(2)由乙圖可知繩子的有效股數(shù)�����,根據(jù)F=G物求出拉力的大小����。
【解答】(1)用撬棒撬石頭時,動力臂大于阻力臂�,是省力杠桿�;
(2)由乙圖可知繩子的有效股數(shù)n=3�����,拉力F=G物=×900N=300N����。
故答案為:省力;300����。
13.(2018·齊齊哈爾)如圖所示的杠桿(自重和摩擦不計),O是支點�,A處掛一重為50N的物體,為保證杠桿在水平位置平衡�,在中點B處沿 (選填“F1”、“F2”或“F3”)方向施加的力
24�����、最小�,為 N。
【解析】本題考查了學(xué)生對杠桿平衡條件的掌握和運用�,根據(jù)動力臂最長時最省力找出動力臂是本題的關(guān)鍵。以支點到力的作用點的距離當(dāng)成力臂時是最大的力臂�����。
解:為使拉力最小,動力臂要最長�,拉力F的方向應(yīng)該垂直杠桿向上,即豎直向上(F2)�,動力臂為OB最長,杠桿在水平位置平衡�,根據(jù)杠桿的平衡條件:
F2×OB=G×OA,由于OA是OB的二倍�,所以:F=2G=100N。
故答案為:F2�;100。
14.(2018·昆明)如圖所示�����,輕質(zhì)杠桿 OA 可繞 O 點無摩擦轉(zhuǎn)動����,A 點處掛一個重為 20N 的物體�����,B 點處加一個豎直向上的力 F�,杠桿在水平位置平衡����,且 OB:AB=2
25�、:1。則 F= N����,它是 杠桿。
【考點】杠桿的平衡條件�;杠桿的分類。
【解析】已知物體G的重力����,再根據(jù)杠桿平衡的條件F?OB=G?OA可直接求F的大小,根據(jù)拉力F和G的大小判斷杠桿的種類�。
【解答】因為OB:AB=2:1,
所以O(shè)B:OA=OB:(OB+AB)=2:(2+1)=2:3�����,
由杠桿平衡的條件F得:F?OB=G?OA可得:F===30N����;
因為F>G,所以此杠桿為費力杠桿����。
故答案為:30����;費力����。
15.(2018·連云港)如圖所示,O為杠桿的支點����,杠桿右端掛有重為G的物體,杠桿在力F1的作用下在水平位置平衡�����。如果用力F2代替力F1使杠桿仍在水平位
26�、置保持平衡,下列關(guān)系中正確的是( ?。?
A.F1<F2 B.F1>F2 C.F2<G D.F1=G
【解析】由題知����,O為支點�����,當(dāng)阻力、阻力臂不變時����,由杠桿的平衡條件知:動力和動力臂的乘積一定,當(dāng)動力臂較大時�����,動力將較?���。粍恿Ρ圯^小時�,動力將較大。因此先判斷出F1�����、F2的力臂大小�,即可判斷出兩力的大小關(guān)系從而比較出F1、F2與G的關(guān)系�����。
AB、設(shè)動力臂為L2����,杠桿長為L(即阻力臂為L);由圖可知�����,F(xiàn)2與杠桿垂直�����,因此其力臂為最長的動力臂����,由杠桿平衡條件可知F2為最小的動力,則F1>F2�,故A錯誤,B正確�����;CD����、用力F2使杠桿在水平位置保持平衡時�����,由杠桿平衡條件可得:F2?L2=
27、G?L�����,由圖知L2<L�����,所以F2>G�����;故C錯誤����;因為F1>F2,F(xiàn)2>G�����,所以F1>F2>G,故D錯誤�。故選:B。
【答案】B�����。
二�����、力與力臂變化問題
1.(2018·聊城)人體中的許多部位都具有杠桿的功能�����。如圖是人用手托住物體時手臂的示意圖�����,當(dāng)人手托5kg的物體保持平衡時�����,肱二頭肌收縮對橈骨所施加力的大小一定( )�。
A.大于5kg B大于49N ??C小于49N D.等于49N
【解析】首先確定杠桿的支點、動力�、阻力及對應(yīng)的動力臂和阻力臂����,根據(jù)杠桿的平衡條件F1L1=F2L2����,并結(jié)合力臂的概念進行分析。
【解答】A�、力的單位是N�����,質(zhì)量的單
28�、位是kg,題目是求力的大小�,不能用kg左單位,故A錯誤����;
BCD、由圖知�����,物體的重力為G=mg=5kg×9.8N/kg=49N�����;
肱二頭肌的拉力為動力,物體對手的壓力為阻力����,支點在肘,如圖所示:
所以動力臂小于阻力臂�,根據(jù)杠桿平衡條件:F1L1=F2L2
因為L1<L2,所以F1>F2
即肱二頭肌收縮所承受的力一定大于49N.故B正確�,CD錯誤。
故選B�����。
2.(2018?廣安)如圖�,AB是能繞B點轉(zhuǎn)動的輕質(zhì)杠桿,在中點C處用繩子懸掛重為100N的物體(不計繩重)在A端施加豎直向上的拉力使杠桿在水平位置平衡����,則拉力F= N。若保持拉力方向始終垂直于杠桿�,將A端緩慢向上提升
29、一小段距離����,在提升的過程中����,拉力F將 ?���。ㄟx填“增大”、“減小”或“不變”)�。
【解析】(1)物體的重力為阻力,杠桿在水平位置保持平衡時����,BC為阻力臂�,BA為動力臂,根據(jù)杠桿的平衡條件F1l1=F2l2求出拉力的大?。唬?)利用杠桿平衡條件分析拉力F的大小變化情況����。
【解答】杠桿在水平位置保持平衡,由F1l1=F2l2可得����,拉力的大小:F1=G=G=×100N=50N����。
若將A端緩慢向上提升一小段距離����,則阻力臂l2將變小����,阻力G不變,即F2l2變小����,
因為拉力方向始終垂直于杠桿,所以動力臂不變�����,l1始終等于BA�,根據(jù)F1l1=F2l2可知F1變小,即拉力F減?。?
故答案為:50
30�����、;減小�����。
3.(2018·邵陽)某物理實驗小組的同學(xué)�����,利用如下圖所示的裝置�����,在杠桿支點的兩邊分別掛上鉤碼來探究杠桿的平衡條件�����。
(1)如圖甲所示�,為使杠桿在水平位置平衡����,應(yīng)將右端的平衡螺母向 移動。(選填“左”或“右”)
(2)實驗中測得的數(shù)據(jù)如下表所示:
測量序號
動力F1/N
動力臂l 1 /cm
阻力F2/N
阻力臂l 2/cm
①
1
20
2
10
②
2
15
1.5
20
③
3
5
1
15
通過探究����,由實驗數(shù)據(jù)可以得出杠桿的平衡條件是 。
(3)如圖乙所示����,將杠桿兩端同時減去一個鉤碼
31�����、�,杠桿左端會 �����。(選填“下沉”或“上升”)
【解析】杠桿在水平位置平衡后�����,支點到力的作用點的距離就是力臂�����,因此在此實驗中我們應(yīng)首先調(diào)節(jié)杠桿在水平位置平衡����。(1)杠桿左端下沉,說明杠桿的重心在支點左側(cè)�,調(diào)節(jié)平衡螺母應(yīng)使杠桿重心右移,這一調(diào)節(jié)過程的目的是為了使杠桿的自重對杠桿平衡不產(chǎn)生影響;杠桿在水平位置平衡時����,力的方向與杠桿垂直,力臂的長度可以直接從杠桿上讀出來�����。(2)分析表中數(shù)據(jù)得出杠桿的平衡條件為:����;(3)用杠桿平衡條件可對兩側(cè)的力的力臂的乘積進行分析,最后做出判斷�����。
解答:(1)如圖甲所示�,杠桿左端下沉,說明杠桿的重心在支點左側(cè)����,應(yīng)將右端的平衡螺母向右移動�����;
(2)分析表
32、中數(shù)據(jù)�����,計算動力乘以動力臂和阻力乘以阻力臂�����,就可以得出杠桿的平衡條件是動力×動力臂=阻力×阻力臂(或)�����。
(3)設(shè)一個鉤碼的重力G�,一格的長度為L,則當(dāng)杠桿兩側(cè)的鉤碼各取下一個后�,左邊 右邊;故杠桿不再水平平衡�����,左側(cè)會下沉����;
故答案為:(1)右;(2) (或“動力×動力臂=阻力×阻力臂”)�����;(3)下沉。
4.(2018·吉林)在“探究杠桿平衡條件”的實驗中:
(1) 把質(zhì)量分布均勻的杠桿中點作為支點�,其目的是消除 對實驗得影響;
(2) 如圖所示�,是已經(jīng)平衡的杠桿,若在兩側(cè)的鉤碼下再各增加一個相同的鉤碼����,杠桿會失去平衡,那么只需要將 (選填:下列序號)�����,杠桿就會重
33����、新平衡;①左側(cè)鉤碼向左移動4個格②右側(cè)鉤碼向左移動2個格③平衡螺母向左適當(dāng)調(diào)節(jié)
(3) 小明改用彈簧測力計做實驗�,如圖所示,使杠桿在水平位置平衡�����,則彈簧測力計的示數(shù) 1N (選填:“大于”�、“小于”、“等于”)����。(每個鉤碼0.5 N )
【解析】重點研究是杠桿平衡條件的實驗,第二問中將鉤碼重�����,及移動后的力臂代入杠桿平衡條件����,兩邊相等就可以平衡,兩邊不等����,不會平衡,第三問中測力計斜著拉杠桿時����,力臂減小,所以動力F要增大����。
(1)把質(zhì)量分布均勻的杠桿中點作為支點,其目的是消除杠桿自重對實驗得影響�,實驗時方便讓杠桿在水平位置平衡�;
(2)如圖所示����,是已經(jīng)平衡的杠桿,若在兩側(cè)的鉤碼
34�����、下再各增加一個相同的鉤碼�,杠桿會失去平衡;
設(shè)杠桿一格長為L�����,每個鉤碼重為G����;
①左側(cè)鉤碼向左移動4個格,可得:����,杠桿不平衡;
②右側(cè)鉤碼向左移動2個格����,可得:�����,杠桿平衡;
③實驗過程中不能通過調(diào)節(jié)平衡螺母來調(diào)整平衡�,方法是錯誤的;
可見②的方法杠桿會重新平衡�,故選②。
(3)小明改用彈簧測力計做實驗�,如圖所示,使杠桿在水平位置平衡�。
當(dāng)圖中測力計豎直向上拉時,得:
解得:����;
如圖中,測力計斜著拉時�����,力F的力臂會減小�����,由于阻力和阻力臂不變����,則動力臂減小�,動力要增大����,所以彈簧測力計的示數(shù)大于1N。
【答案】(1)杠桿自重�����;(2)②����;(3)大于。
5.(2018·益陽)如圖所
35�、示,輕質(zhì)杠桿在中點處懸掛重物�����,在杠桿的最右端施加一個豎直向上的力F�����,杠桿保持平衡,保持力F方向不變�,當(dāng)將重物向右移動時,要使杠桿保持平衡�,力F將??????;將杠桿順時針方向緩慢轉(zhuǎn)動�����,力F將???????(兩空均填“變大”����、“變小”����、“不變”)
【解析】(1)由題知,杠桿最右端的力F豎直向上(方向不變)����,當(dāng)重物向右移動時,重物對杠桿拉力的力臂L2變大�����,F(xiàn)的力臂L1不變(等于杠桿的長)����,阻力G不變�����,由杠桿平衡條件FL1=GL2可知����,力F將變大����;
(2)如圖:
重物懸掛在杠桿的中點,水平平衡時�,動力臂和阻力臂的關(guān)系:L1=2L2,
保持力F方向不變����,杠桿順時針方向緩慢轉(zhuǎn)動后,由圖根
36����、據(jù)相似三角形知識可知,動力臂和阻力臂的關(guān)系:L1′=2L2′����,
物重G不變����,動力臂與阻力臂的比值不變����,由杠桿平衡條件可知,動力F的大小始終等于G�����,即力F將不變����。
故答案為:變大�;不變。
6.(2018·達州)如圖所示����,光滑帶槽的長木條AB(質(zhì)量不計)可以繞支點O轉(zhuǎn)動,木條的A端用豎直細線連接在地板上�����,OA=0.6m�,OB=0.4m。在木條的B端通過細線懸掛一個長方體木塊C,C的密度為0.8×103kg/m3����,B端正下方放一盛滿水的溢水杯。現(xiàn)將木塊C緩慢浸入溢水杯中����,當(dāng)木塊浸入水中一半時,從溢水口處溢出0.5N的水����,杠桿處于水平平衡狀態(tài),然后讓質(zhì)量為300g的小球從B點沿槽向A端勻速運動����,
37、經(jīng)4s的時間系在A端細繩的拉力恰好等于0����,下列結(jié)果不正確的是(忽略細線的重力,g取10N/kg)( ?。?
A.木塊受到的浮力為0.5N�;
B.木塊C受到細線的拉力為0.3N;
C.小球剛放在B端時A端受到細線的拉力為2.2N�;
D.小球的運動速度為0.2m/s
【解析】(1)溢水杯內(nèi)裝滿水�,當(dāng)物體放入后�����,根據(jù)阿基米德原理即可求出物體受到的浮力����;(2)根據(jù)F浮=ρ水V排g求排開水的體積;此時木塊浸入體積為木塊體積的一半�����,可求木塊的體積�����,又知道木塊的密度����,利用密度公式和重力公式求木塊重�����;根據(jù)FB=G﹣F浮求杠桿B端受到的拉力FB�;(3)根據(jù)杠桿平衡條件得出關(guān)系式FA×OA=FB×O
38�����、B求出小球剛放在B端時A端受到細線的拉力����;(4)知道小球的質(zhì)量可求重力�,設(shè)小球的運動速度為v,則小球滾動的距離s=vt�����,可求當(dāng)A端的拉力為0時����,小球到O點距離(s﹣OB=vt﹣OB=v×4s﹣0.4m),再根據(jù)杠桿平衡條件得出G球×s′=FB×OB�,據(jù)此求小球運動速度。
【解答】(1)溢水杯內(nèi)盛滿水�,當(dāng)物體放入后,物體受到的浮力:F浮=G排=0.5N�,故A正確;
(2)根據(jù)F浮=ρ液gV排可得排開水的體積:V排===5×10﹣5m3�����;
因為一半浸入水中,所以物體的體積:V物=2V排=2×5×10﹣5m3=1×10﹣4m3����;
由G=mg和ρ=可得,物體的重力:G=mg=ρ物?V物g=0.
39����、8×103kg/m3×1×10﹣4m3×10N/kg=0.8N,
則B端木塊C所受的拉力:FB=G﹣F浮=0.8N﹣0.5N=0.3N����,故B正確;
(3)小球的質(zhì)量為:m球=300g=0.3kg����,小球的重:G球=m球g=0.3kg×10N/kg=3N,
小球剛放在B端時����,B端受到的力為3N+0.3N=3.3N,
根據(jù)杠桿平衡條件得出關(guān)系式:FA×OA=FB×OB
則A端受到細線的拉力:FA===2.2N�,故C正確�����。
(4)設(shè)小球的運動速度為v,則小球滾動的距離s=vt�����,
當(dāng)A端的拉力為0時�����,杠桿再次平衡�,此時小球到O點距離:s′=s﹣OB=vt﹣OB=v×4s﹣0.4m,
根據(jù)
40����、杠桿平衡條件可知:G球×s′=FB×OB,
即:3N×(v×4s﹣0.4m)=0.3N×0.4m����,解得:v=0.11m/s。故D錯誤�����。
故選D����。
7.(2018?淄博)骨胳�����、肌肉和關(guān)節(jié)構(gòu)成了人體的運動系統(tǒng)�,最基本的運動都是肌肉牽引骨胳繞關(guān)節(jié)轉(zhuǎn)動產(chǎn)生的�����,其模型就是杠桿�����。如圖所示是踮腳時的示意圖�����,人體的重力為阻力�����,小腿肌肉施加的拉力為動力����。重600N的小明在lmin內(nèi)完成50個雙腳同時踮起動作,每次踮腳過程中腳跟離開地面的高度是9cm。求:
(1)小腿肌肉對每只腳的拉力�;
(2)小明踮腳過程中克服重力做功的功率����。
【解析】(1)根據(jù)杠桿的平衡條件分析解答小腿肌肉對每只腳的拉力;(2
41�、)小明踮腳過程中克服重力做功等于小腿肌肉對腳的拉力做的功,根據(jù)P=算出小明踮腳過程中克服重力做功的功率�����。
【解答】(1)由圖知�����,動力F的力臂L1=8cm+4cm=12cm=0.12m����;重力的力臂L2=8cm=0.08m;
根據(jù)杠桿的平衡條件可得:FL1=GL2�,
則小腿肌肉對每只腳的拉力:F===400N;
(2)小腿肌肉對腳的拉力做的功:W拉力=Fh=400N×0.09m=36J�����;
小明踮腳過程中克服重力做功等于小腿肌肉對腳的拉力做的功,等于36J����;
小明在lmin內(nèi)完成50個雙腳同時踮起動作,
則小明踮腳過程中克服重力做功的功率:P===30W����。
答:(1)小腿肌肉對每只腳
42、的拉力為400N�;(2)小明踮腳過程中克服重力做功的功率為30W。
8.(2018·濱州)小明在“研究杠桿平衡條件”的實驗中所用的實驗器材有�����,刻度均勻的杠桿����,支架,彈簧測力計����,刻度尺,細線和質(zhì)量相同的0.5N重的鉤碼若干個�。
(1)如圖A所示,實驗前�����,杠桿左側(cè)下沉,則應(yīng)將左端的平衡螺母向 ?����。ㄟx填“左”或”右”)調(diào)節(jié)�����,直到杠桿在 位置平衡�,目的是便于測量 �����,支點在杠桿的中點是為了消除杠桿 對平衡的影響�。
(2)小明同學(xué)所在實驗小組完成某次操作后,實驗象如圖B所示�,他們記錄的數(shù)據(jù)為動力F1=1.5N,動力臂L1=0.1m����,阻力F2=1N,則阻力臂L2=
43�、 m����。
(3)甲同學(xué)測出了一組數(shù)據(jù)后就得出了”動力×動力臂=阻力×阻力臂”的結(jié)論�,乙同學(xué)認為他的做法不合理,理由是 �����。
(4)丙同學(xué)通過對數(shù)據(jù)分析后得出的結(jié)論是:動力×支點到動力作用點的距離=阻力×支點到阻力作用點的距離����,與小組同學(xué)交流后,乙同學(xué)為了證明丙同學(xué)的結(jié)論是錯誤的�,他做了如圖C的實驗,此實驗 ?���。ㄟx填“能”或”不能”)說明該結(jié)論是錯誤的,圖C實驗中�,已知杠桿上每個小格長度為5cm,每個鉤碼重0.5N����,當(dāng)彈簧測力計在A點斜向上拉(與水平方向成30°角)杠桿,使杠桿在水平位置
44����、平衡時�����,動力×動力臂 ?����。ㄟx填“等于”或“不等于”)阻力×阻力臂”�����。
【解析】(1)調(diào)節(jié)杠桿在水平位置平衡,杠桿右端偏高����,左端的平衡螺母應(yīng)向上翹的右端移動,使杠桿在水平位置平衡�����,力臂在杠桿上�,便于測量力臂大小,同時消除杠桿自重對杠桿平衡的影響����;
(2)杠桿平衡條件為:F1L1=F2L2�。由杠桿平衡條件得:1.5N×0.1m=1N×L2�����,得:L2=0.15m����;
(3)只有一次實驗得出杠桿平衡的條件是:動力×動力臂=阻力×阻力臂。這種結(jié)論很具有偶然性�,不合理。要進行多次實驗�,總結(jié)杠桿平衡條件。
(4)丙同學(xué)通過對數(shù)據(jù)分析后得出的結(jié)論是:動力×支點到動力作用點的距離=阻力×支點到阻力
45�����、作用點的距離����,與小組同學(xué)交流后,乙同學(xué)為了證明丙同學(xué)的結(jié)論是錯誤的�����,他做了如圖C的實驗,此實驗?zāi)艿玫健皠恿Α林c到動力作用點的距離=阻力×支點到阻力作用點的距離”�,這個結(jié)論是不正確的;當(dāng)動力臂不等于支點到動力作用點的距離時�����,看實驗結(jié)論是否成立�,所以利用圖C進行驗證;杠桿平衡條件為:F1L1=F2L2����。由杠桿平衡條件得:4×0.5N×3×5cm=3N××4×5cm,左右相等�,杠桿在水平位置平衡時�����,動力×動力臂 等于阻力×阻力臂”����。
答案:(1)右;水平�����;力臂;自重�����;(2)0.15����;(3)一組實驗數(shù)據(jù)太少,具有偶然性����,不便找出普遍規(guī)律;(4)能����;等于。
9.(2018·臨沂)圖(a)所示的杠桿
46�����、是水平平衡的�����。如果在支點兩側(cè)的物體下方分別加掛一個等重的物體,如圖(b)所示�����,則杠桿( ?。?
A.右端下沉����;
B.左端下沉;
C.要保持平衡應(yīng)將左端的物體向右移動�;
D.要保持平衡應(yīng)在右端再加掛一個物體
【解析】(a)圖杠桿是平衡的,原因是兩邊的力和力臂的乘積相等����,(b)圖分別加掛一個等重的物體后,分析兩邊的力和力臂的乘積是否還相等����,據(jù)此判斷丁圖的杠桿是否還平衡�。
【解答】AB、設(shè)一個鉤碼重為G����,杠桿一格長為L,(a)圖杠桿平衡是因為:2G×2L=G×4L�����;
(b)圖分別加掛一個等重的物體后(為便于研究,設(shè)物體的重也為G)�,
左邊力與力臂的乘積:3G×2L,右邊力與力臂的
47����、乘積:2G×4L,
因為3G×2L<2G×4L����,即右邊力與力臂的乘積較大,
所以杠桿不能平衡�,右端下沉;故A正確�,B錯誤;
CD����、若想讓杠桿能夠平衡,可以將左端的物體向左移動����,從而增大左邊的力臂,使左邊的力與力臂的乘積等于右邊的力與力臂的乘積,故C錯誤����;
若想讓杠桿能夠平衡,可以在左端再加掛一個物體�,左邊的力變大,使左邊的力與力臂的乘積等于右邊的力與力臂的乘積�����,故D錯誤�。
故選A。
三�����、再平衡問題
1.(2018·廣西北部灣)在探究“杠桿平衡條件“實驗中����,杠桿在力F作用下水平平衡,如圖所示�,現(xiàn)將彈簧測力計繞B點從a位置轉(zhuǎn)動到b位置過程中,杠桿始終保持水平平衡�,則拉力F與其力臂的乘
48、積變化情況是( )�����。
A.一直變小 B.一直變大 C.一直不變 D.先變小后變大
【解析】將測力計繞B點從a位置轉(zhuǎn)動到b位置過程中�,鉤碼的重力不變,其力臂OA不變����,即阻力與阻力臂的乘積不變;由于杠桿始終保持水平平衡����,所以根據(jù)杠桿的平衡條件可知,拉力F與其力臂的乘積也是不變的�。
故選C。
2.(2018·安順)甲�、乙兩位同學(xué)一起做《探究杠桿平衡條件》的實驗,以杠桿中點為支點����,如圖1、圖2所示����。
(1)實驗過程中應(yīng)將杠桿調(diào)節(jié)到水平位置平衡,這樣做的目的是為了消除杠桿自重對實驗的影響和 ??����;若杠桿右端
49�����、低左端高�,為使其在水平位置上靜止����,應(yīng)將左端的平衡螺母向端調(diào)節(jié) (填“左”或“右”)�����。
(2)如圖1所示�����,杠桿在水平位置平衡�,記錄數(shù)據(jù)。根據(jù)這一次實驗數(shù)據(jù)����,甲同學(xué)立即分析得出杠桿的平衡條件�����,這種做法的不足是: 。
(3)如圖2所示����,乙同學(xué)設(shè)計了兩種實驗方案:第一種彈簧測力計沿豎直方向拉,其讀數(shù)為F1����;第二種彈簧測力計傾斜拉,其讀數(shù)為F2�,第 (填“一”或“二”)種實驗方案更方便�。在同等條件下,兩次彈簧測力計讀數(shù)F1 F2(填“<”�����、“≡”或“>”)�。
(4)杠桿在生活中有很多應(yīng)用。現(xiàn)欲使如圖3所示的靜止蹺蹺板發(fā)生轉(zhuǎn)動����,小女孩乙可采取的做法是 ����。
【
50����、解析】調(diào)節(jié)杠桿兩端的平衡螺母,使平衡螺母向上翹的一端移動����,使杠桿在水平位置平衡,杠桿在水平位置平衡�����,力臂在杠桿上����,便于測量力臂大小,同時消除杠桿重對杠桿平衡的影響����;在調(diào)節(jié)杠桿平衡時,應(yīng)將平衡螺母向較高的一端調(diào)節(jié)����;為了便于測量力臂����,應(yīng)使杠桿在水平位置平衡����;初中物理用實驗探究物理問題時要進行多次實驗�,有的是為了多次測量求平均值來減小誤差;有的是多次測量發(fā)現(xiàn)變化規(guī)律�����;有的是為了使實驗結(jié)論具有普遍性�;杠桿的平衡條件是:;探究杠桿平衡條件時�����,使杠桿在水平位置平衡�,此時力的方向與杠桿垂直,力臂的長度可以直接從杠桿上讀出來�。蹺蹺板就是杠桿的應(yīng)用,它是通過改變力的大小或者力臂的長度使杠桿發(fā)生轉(zhuǎn)動的�。
解:當(dāng)
51、在杠桿上掛物體時�����,杠桿在水平位置平衡,力臂在杠桿上����,便于測量力臂,同時消除了杠桿自重對杠桿平衡的影響�����;在調(diào)節(jié)杠桿平衡時�����,杠桿右端低左端高�,要使杠桿在水平位置平衡,應(yīng)將杠桿右端的平衡螺母向左端調(diào)節(jié)����;
只有一次實驗總結(jié)實驗結(jié)論是不合理的,一次實驗很具有偶然性�����,要多進行幾次實驗,避免偶然性�����;
力臂等于支點到力的作用線的距離�����,當(dāng)杠桿在水平位置平衡時����,力的方向與杠桿垂直,力臂可以從杠桿標(biāo)尺刻度上直接讀出來�,因此第一種實驗方案更方便����,此時彈簧測力計的拉力與杠桿垂直,能從杠桿上直接讀力臂����;因為第一方案的動力臂要大于第二種方案的動力臂,根據(jù)杠桿的平衡條件�����,在阻力和阻力臂都相同的情況下,動力臂越大的越省力�����,
52、所以�����,����;
要使翹翹板轉(zhuǎn)動����,可采取的做法是:男孩不動,女孩向遠離支點方向移動或者女孩不動�,男孩向靠近支點方向移動;或者女孩不動�,男孩蹬地,減小男孩對蹺蹺板的壓力�����。
【答案】便于測量力臂����;左�����;僅憑一次實驗的數(shù)據(jù)得出的結(jié)論具有偶然性�;一�����;�����;向遠離支點方向移動�����。
3.小紅和小明利用如圖所示裝置探究杠桿的平衡條件�����。
(1)若實驗前杠桿如圖甲所示�,可將杠桿兩端的平衡螺母向 (填“左”或“右”)調(diào)節(jié)�,使杠桿在水平位置平衡。
(2)在實驗過程中,調(diào)節(jié)杠桿在水平位置平衡的目的是 ����。
(3)在杠桿兩端加掛鉤碼,并移動鉤碼����,使杠桿在水平位置平衡,測出力臂�,多次實驗并把數(shù)據(jù)記錄在表
53、格中�����。
次數(shù)
F1/N
L1/cm
F2/N
L2/cm
1
1
10
2
5
2
2
10
1
20
3
2
15
3
10
小明根據(jù)以上數(shù)據(jù)得出杠桿平衡條件是 ����。
(4)杠桿調(diào)節(jié)平衡后,小紅在杠桿上的A點處掛4個鉤碼�����,如圖乙所示�,為使在重新平衡,應(yīng)在B點掛 個鉤碼�����。當(dāng)杠桿平衡后,將A點和B點下方所掛的鉤碼同時向支點0靠近一格�����,杠桿會 ?���。ㄌ睢白髠?cè)下降”、“右側(cè)下降”或“仍水平平衡”)�。
(5)如圖丙所示,用彈簧測力計在C處豎直向上拉�,使杠桿在水平位置平衡,當(dāng)彈簧測力計在原位置逐漸向左傾斜時�����,使杠桿仍然在水平位置平衡�,則彈簧測力
54、計的示數(shù)將 ?。ㄌ睢白兇蟆?���,“變小”或“不變”)�。
【解析】(1)若實驗前杠桿如圖甲所示�,左端下沉,右端上翹����,可將杠桿兩端的平衡螺母向右調(diào)節(jié),使杠桿在水平位置平衡�。
(2)實驗時讓橫桿AB在水平位置平衡,力臂在杠桿上便于測量力臂大小�,杠桿的重心通過支點,可以消除杠桿重對杠桿平衡的影響����;
(3)分析表格中的數(shù)據(jù)可得出杠桿平衡的條件是:F1L1=F2L2;
(4)設(shè)杠桿每個格的長度為L����,每個鉤碼的重力為G,根據(jù)杠桿的平衡條件:FALA=FBLB�����,即4G×3L=FB×2L�,解得FB=6G,需掛6個鉤碼�����;
根據(jù)杠桿的平衡條件:FALA=FBLB,若A�、B兩點的鉤碼同時向靠近支點的方向移動一
55、個格�����,則左側(cè)4G×2L=8GL����,右側(cè)6G×L=6GL,因為8GL>6GL�����,所以杠桿左端會下降�����;
(5)如果作用在杠桿上的力方向不與杠桿垂直則該力的力臂短了�����,就會使得拉力變大�;
故答案為:(1)右;(2)便于測量力臂�����;(3)F1L1=F2L2�����;(4)6�;左側(cè)下降;(5)變大�����。
4.(2018·長沙)在認識到杠桿轉(zhuǎn)動跟力�����、力臂有關(guān)后�����,某實驗小組通過實驗進一步探究杠桿的平衡條件�。以下是他們的部分實驗過程:
(1)首先,將杠桿放在水平桌面上�,在不掛鉤碼的情況下�,調(diào)節(jié)杠桿兩端的平衡螺母�����,使杠桿平衡在 位置上�,以方便直接讀出力臂;
(2)接下來�����,他們使杠桿在如圖位置靜止����,多次實驗,記錄
56�、數(shù)據(jù)如表格所示(每個鉤碼的重力為1N,杠桿質(zhì)量�、刻度分別均勻);小玲認為杠桿的平衡條件為F1=F2����,L1=L2;而小軍則認為實驗還需要進一步改進�。你認為小玲總結(jié)的杠桿平衡是 (選填“正確的”或“錯誤的”);
實驗序號
F1/N
L1/cm
F2/N
L2/cm
1
2
3
2
3
2
3
3
3
3
3
4
3
4
3
(3)如果小軍在杠桿左端A點再掛2個鉤碼(即左端共4個鉤碼),接下來����,他應(yīng)該將右端的兩個鉤碼向右移動 格,杠桿才會在原位置再次平衡����。
【考點】探究杠桿的平衡條件����。了解杠桿的平衡條件。
【解析】(1)調(diào)節(jié)杠桿兩
57����、端的平衡螺母,使杠桿平衡在水平位置上�,以方便直接讀出力臂;(2)小玲認為杠桿的平衡條件為F1=F2�����,L1=L2�;而小軍則認為實驗還需要進一步改進。你認為小玲總結(jié)的杠桿平衡是錯誤的�;(3)如果小軍在杠桿左端A點再掛2個鉤碼(即左端共4個鉤碼),接下來,他應(yīng)該將右端的兩個鉤碼向右移動2格(即右邊第4個刻度)����,杠桿才會在原位置再次平衡。
故答案為:(1)水平�;(2)錯誤的;(3)2�����。
5.(2018?棗莊)如圖所示是小李和小王利用刻度均勻的輕質(zhì)杠桿探究“杠桿平衡條件”的實驗裝置����。
(1)實驗前沒掛鉤碼時,杠桿靜止的位置如圖甲所示�����,此時應(yīng)將螺母向 調(diào)節(jié)����,使杠桿在水平位置平衡。
(2)杠
58����、桿平衡后����,小李在左右兩側(cè)分別掛上鉤碼����,如圖乙所示,杠桿的 端會下沉�����,要使杠桿重新在水平位置平衡�����,在不改變鉤碼懸掛點的位置和改變較少鉤碼的前提下�����,只需將 即可�����。
(3)小李和小王又分別設(shè)計了兩種實驗方案�����,小李的方案如圖丙所示����,小王的方案如圖丁所示。你認為 的實驗方案更好����,請說明你的理由 。
(4)實驗中小王發(fā)現(xiàn):如果在杠桿的O點用彈簧測力計施加一個向上的力����,這個力在探究實驗時是否影響到杠桿的平衡?請說明理由
59����、 。
【解析】(1)調(diào)節(jié)杠桿在水平位置平衡時����,平衡螺母向上翹的一端移動;探究杠桿平衡條件時����,使杠桿在水平位置平衡,這樣方便測量力臂�����;(2)設(shè)一個鉤碼重為G,杠桿一個小格是L�,根據(jù)杠桿平衡條件判斷杠桿向那端下降,要保持平衡����,根據(jù)杠桿的平衡條件判斷移動那側(cè)鉤碼;(3)根據(jù)鉤碼個數(shù)與每個鉤碼的重力求出測力計拉力����,根據(jù)杠桿的平衡條件可知,圖丙彈簧測力計方向向上����,容易測量力臂����,圖丁方向不與杠桿垂直,不易測量力臂�;(4)過支點的力,力臂為零����。
【解答】(1)調(diào)節(jié)杠桿在水平位置平衡����,杠桿右端偏高����,左端的平衡螺母應(yīng)向上翹的右端移動,使杠桿在水平
60�����、位置平衡�,力臂在杠桿上,便于測量力臂大小����,同時消除杠桿自重對杠桿平衡的影響;
(2))設(shè)杠桿每個格的長度為L�,每個鉤碼的重力為G,根據(jù)杠桿的平衡條件:F左L左=F右L右����,即4G×2L>2G×3L,左端大�,故左端下沉;要使杠桿重新在水平位置平衡�����,如果不改變鉤碼總個數(shù)和懸掛點位置,只需要將左側(cè)的鉤碼去掉一個即可平衡����;
(3)由圖可知,彈簧測力計在圖丙的力與力臂垂直�,力臂在杠桿上便于測量,圖丁的力不與杠桿垂直����,力臂不方便測量,圖丙好�����;
(4)杠桿在O點還受到一個向上的力�����,這個力與杠桿自身重力都過杠桿的支點�,力臂為零�,這兩個力在探究杠桿平衡時不會影響到杠桿的平衡。
故答案為:(1)右����;(2)左
61�、�;將左側(cè)的鉤碼去掉一個;(3)小李�����;彈簧測力計在圖丙的力與力臂垂直�����,力臂在杠桿上便于測量����;(4)這個作用在杠桿O點的力的力臂等于零,不影響杠桿的平衡�。
6.(2018?青島)實驗探究:探究杠杄的平衡條件。
數(shù)據(jù)
如圖甲�,利用鉤碼和刻度尺測量出杠桿平衡時各個力及其力臂,測得數(shù)據(jù)如下表:
次數(shù)
動力F1/N
動力臂L1/cm
阻力F2/N
阻力臂L2/cm
1
1.0
10
2.0
5
2
1.5
5
0.5
15
3
2.0
15
1.5
20
結(jié)論
作圖
①杠桿的平衡條件是 �。
②實驗進行3次的目的是 (只有個選項正確,
62�、填寫對應(yīng)字母)。
a.取平均值減小誤差
b.使每組數(shù)據(jù)更準(zhǔn)確
c.歸納出物理規(guī)律
③如圖乙����,若用彈簧測力計的拉力作動力�,進行實驗�,請畫出其動力臂。
【解析】(1)杠桿的平衡條件:F1L1=F2L2����;(2)實驗中為得出普遍性規(guī)律,應(yīng)多次測量分析得出結(jié)論����;(3)力臂是從支點到力的作用線的垂直距離,據(jù)此畫出力臂的垂線����。
【解答】解:①第一次數(shù)據(jù):F1L1=F2L2
1N×0.1m=2N×0.05m,F(xiàn)1L1=F2L2�,
第二組數(shù)據(jù):F1L1=F2L2,1.5N×0.05m=0.5N×0.15m
第三組數(shù)據(jù):F1L1=F2L2�����,2N×0.15m=1.5N×0.2m
杠桿的平衡條件為:F1L1=F2L2�。
②如果實驗次數(shù)太少�,實驗研究得出結(jié)論具有偶然性����,不具有普遍性�,實驗結(jié)論必須在多次試驗的基礎(chǔ)上得出,這樣才能有效地避免實驗結(jié)果偶然性出現(xiàn)�����,故選c�����;
③畫出其動力臂:
故答案為:①F1L1=F2L2�����;②c�;③如上圖。
34
 (決勝中考)中考物理 分類解讀與強化訓(xùn)練 專題六 動態(tài)杠桿分析(含解析) 新人教版
(決勝中考)中考物理 分類解讀與強化訓(xùn)練 專題六 動態(tài)杠桿分析(含解析) 新人教版