《四旋翼無(wú)人機(jī)前沿報(bào)告》由會(huì)員分享�,可在線閱讀,更多相關(guān)《四旋翼無(wú)人機(jī)前沿報(bào)告(5頁(yè)珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索���。
1�、
四旋翼無(wú)人機(jī)前沿報(bào)告
近些年來(lái)��,各國(guó)的許多研究機(jī)構(gòu)都對(duì)小型四旋翼無(wú)人機(jī)進(jìn)行了一系列的研究�,下面列出來(lái)一些比較有代表性的四旋翼無(wú)人機(jī)研究成果。
一���、國(guó)內(nèi)外技術(shù)發(fā)展現(xiàn)狀
1.“蜻蜓”無(wú)人機(jī)
近期�,約翰-霍普金斯大學(xué)的應(yīng)用物理實(shí)驗(yàn)室的一個(gè)研究小組就開發(fā)出了一個(gè)叫做“蜻蜓(Dragonfly)”的概念無(wú)人機(jī)任務(wù)�。該任務(wù)提出了一款利用放射性同位素驅(qū)動(dòng)的雙四旋翼飛行器��,它將可以在土星最大的衛(wèi)星Titan上執(zhí)行太空任務(wù)��。蜻蜓項(xiàng)目首席研究員Elizabeth Turtle指出��,這種實(shí)驗(yàn)是他們?cè)趯?shí)驗(yàn)室無(wú)法進(jìn)行的��,因?yàn)樯婕暗綍r(shí)間尺度問題���,而Titan富含有有機(jī)分子和液態(tài)水的表面卻能維
2、持很長(zhǎng)一段時(shí)間的時(shí)間尺度�。該項(xiàng)目就是為了研究Titan生命前化學(xué)而設(shè)計(jì)的。由于Titan表層厚重的云層使得那里的太陽(yáng)能效率并不高��,為此���,研究人員改用了多任務(wù)放射性同位素?zé)犭姍C(jī)(MMRTG)為飛行器提供能源���。據(jù)了解,MMRTG能讓這架雙四旋翼無(wú)人機(jī)在白天持續(xù)飛行一個(gè)小時(shí)的時(shí)間�,夜晚它將接受充電。
蜻蜓無(wú)人機(jī)的空氣流動(dòng)可以讓它收集樣本和測(cè)量的種類獲得增加��。在時(shí)長(zhǎng)1個(gè)小時(shí)的飛行中�,飛行器大概能飛10到20公里���。這意味著蜻蜓可以在為期兩年的任務(wù)中探測(cè)到的范圍非常廣��。
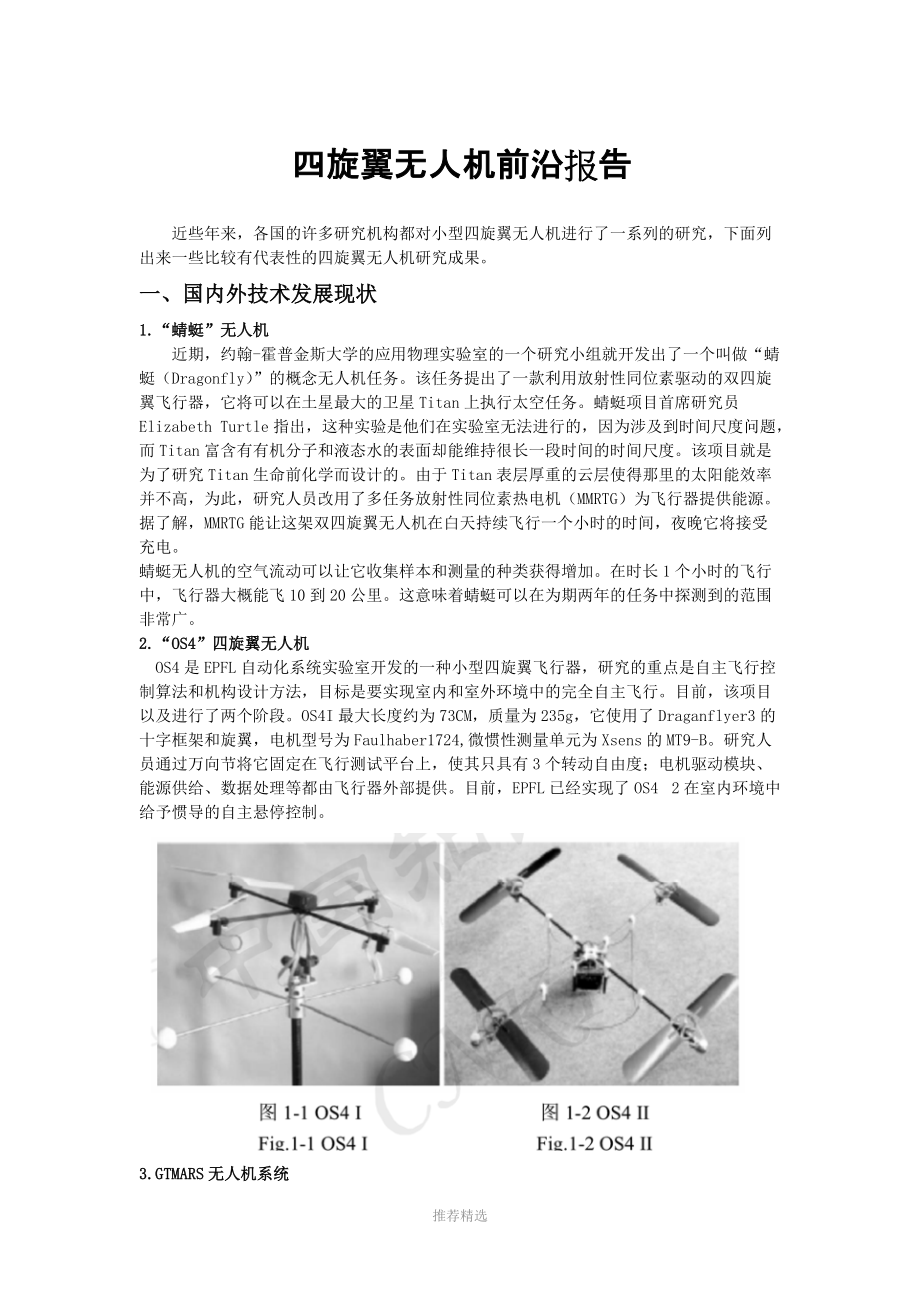
2.“OS4”四旋翼無(wú)人機(jī)
OS4是EPFL自動(dòng)化系統(tǒng)實(shí)驗(yàn)室開發(fā)的一種小型四旋翼飛行器��,研究的重點(diǎn)是自主飛行控制算法和機(jī)構(gòu)設(shè)計(jì)
3���、方法���,目標(biāo)是要實(shí)現(xiàn)室內(nèi)和室外環(huán)境中的完全自主飛行。目前�����,該項(xiàng)目以及進(jìn)行了兩個(gè)階段���。OS4I最大長(zhǎng)度約為73CM�,質(zhì)量為235g����,它使用了Draganflyer3的十字框架和旋翼,電機(jī)型號(hào)為Faulhaber1724,微慣性測(cè)量單元為Xsens的MT9-B�����。研究人員通過萬(wàn)向節(jié)將它固定在飛行測(cè)試平臺(tái)上,使其只具有3個(gè)轉(zhuǎn)動(dòng)自由度�;電機(jī)驅(qū)動(dòng)模塊、能源供給�����、數(shù)據(jù)處理等都由飛行器外部提供�。目前,EPFL已經(jīng)實(shí)現(xiàn)了OS4 2在室內(nèi)環(huán)境中給予慣導(dǎo)的自主懸?�?刂?。
3.GTMARS無(wú)人機(jī)系統(tǒng)
推薦精選
GTMARS是佐治亞理工大學(xué)面向火星探測(cè)任務(wù)而設(shè)計(jì)的無(wú)人機(jī)系統(tǒng)。它中20KG����,旋翼半徑0.92m
4、�����,續(xù)航時(shí)間30min�。GTMARS開始為折疊狀態(tài),陸器登陸火星后,幾個(gè)將自動(dòng)展開�,它能夠自主起飛和降落,巡航速度可達(dá)72KM/H�,當(dāng)能量不足時(shí),它可以返回到著陸器補(bǔ)充能量�����,著陸器裝載有太陽(yáng)能電池��。
4.Microdrones四旋翼無(wú)人機(jī)
德國(guó)Microdrones公司開發(fā)出了一款小型四旋翼無(wú)人機(jī)��,型號(hào)為MD4-200��,這個(gè)無(wú)人機(jī)采用MD公司自行設(shè)計(jì)的盤式電機(jī)��,機(jī)身全部用碳纖維制作����,懸停時(shí)電流參考值為2A�,裝有GPS定位系統(tǒng),并配有相應(yīng)的地面站系統(tǒng)以及視頻傳輸系統(tǒng)��。
Sanford 大學(xué)使用一個(gè)改進(jìn)后的Drangonflyer作為其自主飛行器Multi-Agent控制研究的測(cè)試平臺(tái)�。
5、選擇Draganflyer四旋翼無(wú)人機(jī)進(jìn)行方案驗(yàn)證��。Draganflyer原先的芯片被Stanford大學(xué)自主設(shè)計(jì)的控制器所取代。這款控制器用于執(zhí)行所以的傳感和通訊任務(wù)��,他由如下組件構(gòu)成:一個(gè)被稱為MicroStrain的商用IMU�,兩塊PICS微控制芯片,一個(gè)超聲速聲納定位傳感器����,一個(gè)GPS單元和一個(gè)有效距離為150—300英尺的而行藍(lán)牙設(shè)備。地面計(jì)算系統(tǒng)由幾臺(tái)PC機(jī)和一個(gè)配有用于遙控飛行器的標(biāo)準(zhǔn)操作桿的筆記本電腦組成�。IMU從傳感器得到相關(guān)數(shù)據(jù)后估算出當(dāng)前飛行器的高度及其變化速度,然后將這兩個(gè)數(shù)據(jù)輸出�����,由于飛行器的支架在升力很大時(shí)會(huì)有強(qiáng)烈的震動(dòng)�����,這兩個(gè)數(shù)據(jù)很可能混有較大的噪聲�����,因而準(zhǔn)確性較
6�����、低。系統(tǒng)同時(shí)加入了一個(gè)紅外距離傳感器來(lái)幫助飛行器飛行軌跡在特定區(qū)域時(shí)的聲納測(cè)距任務(wù)�。使用卡爾曼濾波器對(duì)位置和速度的信息進(jìn)行估計(jì)。實(shí)驗(yàn)表明���,該飛行器在戶外盤旋狀態(tài)下表現(xiàn)良好�����。并具有一定的抗風(fēng)險(xiǎn)能力��。
從上述的研究狀況可以看出,四旋翼無(wú)人機(jī)的研究重點(diǎn)一是功能全面的控制器與傳感器系統(tǒng)�����,二是四旋翼無(wú)人機(jī)的控制方法����。控制器與傳感器系統(tǒng)大多包括微控制芯片���、導(dǎo)航系統(tǒng)�、各種測(cè)距傳感器以及視覺輔助設(shè)備?���?刂品椒ū容^多樣,PID�����、LQ��、Backstepping�、Sliding-mode等都有應(yīng)用。
5.四旋翼無(wú)人機(jī)的運(yùn)動(dòng)能力
在2013年�����,一個(gè)TED的無(wú)人機(jī)視頻火遍了全網(wǎng)��,叫做《四旋翼直升機(jī)的驚人運(yùn)動(dòng)機(jī)
7���、能》�����,視頻中演示人員用平衡桿�、乒乓球、酒杯等向我們演示了無(wú)人機(jī)的運(yùn)動(dòng)能力���,讓人嘆為觀止��。最后研究人員表示這一切的運(yùn)動(dòng)能力的來(lái)源都是算法的作用�����。時(shí)間過去了幾年�,Raffaello D'Andrea和他創(chuàng)立的工作室可沒閑著:他們讓無(wú)人機(jī)作為搬運(yùn)工�,在法國(guó)當(dāng)代藝術(shù)中心上演了一場(chǎng)運(yùn)貨表演——用1500塊磚搭建了6米高的塔。以及操縱無(wú)人機(jī)用繩子編出一座簡(jiǎn)易橋梁(確實(shí)可以使用)�。
推薦精選
二、現(xiàn)狀的總結(jié)和思考
四旋翼無(wú)人機(jī)的發(fā)展不斷朝著智能化����、集成化發(fā)展���,未來(lái)的四旋翼無(wú)人機(jī)飛行動(dòng)力以及能源問題將會(huì)得到解決���,利用燃料電池、太陽(yáng)能電池或者油動(dòng)發(fā)動(dòng)機(jī)�,其續(xù)航時(shí)間將會(huì)大大增加�;其飛行控制系統(tǒng)將
8��、是一個(gè)集成導(dǎo)航��、通信��、自動(dòng)控制的飛行芯片�,運(yùn)用更高級(jí)的控制算法,實(shí)現(xiàn)多旋翼無(wú)人機(jī)與大型多旋翼無(wú)人機(jī)并駕齊驅(qū)發(fā)展�,其中大型多旋翼能搭載更多的任務(wù)設(shè)備甚至載人飛行。
圖1-5:四旋翼式蜂鳥無(wú)人機(jī)
目前我國(guó)的無(wú)人機(jī)產(chǎn)業(yè)最耀眼的明星就是大疆創(chuàng)新了����。大疆是一家總部位于中國(guó)深圳的無(wú)人機(jī)制造廠商,成立于2006年�����。該公司生產(chǎn)的DJI無(wú)人機(jī)被廣泛運(yùn)用于航拍����,并且很受專業(yè)及業(yè)余級(jí)攝影師們的青睞。其產(chǎn)品線涵蓋中端價(jià)位的Phantom以及高端市場(chǎng)絕對(duì)王者的Inspire系列�。
一架無(wú)人機(jī)系統(tǒng)由地面站、飛機(jī)����、鏈路三個(gè)核心部分組成���。無(wú)人機(jī)地面站是整個(gè)無(wú)人機(jī)系統(tǒng)的指揮控制中心,專門用于對(duì)無(wú)人機(jī)的地面控制和管
9�����、理�。飛機(jī)是無(wú)人機(jī)系統(tǒng)的主體,而它的核心組件是其飛行控制系統(tǒng)(簡(jiǎn)稱飛控)��,它是飛行器穩(wěn)定飛行的保證���。鏈路主要負(fù)責(zé)飛機(jī)與地面站之間的通訊�,通過多種通信方式將飛機(jī)上的飛行數(shù)據(jù)實(shí)時(shí)傳輸?shù)降孛嬲?,并可以將地面站發(fā)出的控制信號(hào)傳給飛機(jī),從而使得無(wú)人機(jī)按照既定的指令飛行����。
推薦精選
圖1-6 大疆無(wú)人機(jī)
我認(rèn)為目前我們的無(wú)人機(jī)應(yīng)該更加的重視交互技術(shù):
1)手勢(shì)控制技術(shù)
手勢(shì)交互是一種未來(lái)的人機(jī)交互趨勢(shì)����,目前在精確度上存在挑戰(zhàn)�。在CES2014的展場(chǎng)上�,有利用MYO手勢(shì)控制臂帶來(lái)控制AR.Drone2.0四旋翼的演示。
2)腦機(jī)接口技術(shù)
近年來(lái)�����,科研人員在多個(gè)領(lǐng)域都運(yùn)用到了BCI(B
10�、rain Computer Interface)腦機(jī)接口技術(shù))技術(shù),各類科技公司運(yùn)用該技術(shù)制作新型玩具�、為殘疾人制作義肢。但若是作為對(duì)安全性要求較高的飛行器�,這種技術(shù)目前還不成熟。它可作為一種驗(yàn)證性質(zhì)的技術(shù)展示�����,離實(shí)際還有不少距離�。
3)體感控制技術(shù)
體感控制包括手勢(shì)和姿態(tài),類似于PS4等游戲機(jī)上的體感控制���,有著直觀�、易學(xué)���、易操作等特點(diǎn)�����。隨著信息時(shí)代的不斷發(fā)展����,人機(jī)交互越來(lái)越成為科研人員研究的重點(diǎn),Kinect傳感器作為人機(jī)交互的中介��,自然會(huì)被應(yīng)用到無(wú)人機(jī)的控制中來(lái)���。
Kinect傳感器由Microsoft公司于2010年推出��,可以同時(shí)獲取彩色圖像數(shù)據(jù)和深度圖像數(shù)據(jù)�����,支持實(shí)時(shí)的全身骨骼跟
11�、蹤�,獲取人體骨架的20個(gè)關(guān)節(jié)點(diǎn)[2]。同時(shí)����,Kinect SDK允許開發(fā)者借助Visual Studio 2010進(jìn)行相關(guān)開發(fā),通過相關(guān)算法設(shè)計(jì)實(shí)現(xiàn)人體的動(dòng)作識(shí)別��。
無(wú)人機(jī)不論是從它的發(fā)展前景��,理論技術(shù)還是從發(fā)展傳統(tǒng)汽車行業(yè)�,增大行業(yè)競(jìng)爭(zhēng)力來(lái)看都是非常具有研究潛力的。這些系統(tǒng)的出現(xiàn)離不開很多關(guān)鍵技術(shù)�,也正是因?yàn)檫@些技術(shù)的進(jìn)步,未來(lái)的無(wú)人機(jī)將會(huì)躍向一個(gè)新的高度���。以史為鑒�,我們不難發(fā)現(xiàn)無(wú)人機(jī)發(fā)展有幾個(gè)大致方向:更精密的算法使它們變得越來(lái)越智能�����,而多項(xiàng)尖端科技的加持���,減輕了無(wú)人機(jī)駕駛員在操作無(wú)人機(jī)時(shí)的負(fù)擔(dān)����,使得無(wú)人機(jī)更加“來(lái)去自如”��。而無(wú)人機(jī)的高速發(fā)展與科研人員的定向研究必將會(huì)使它們的成本變低��,未
12、來(lái)無(wú)人機(jī)將會(huì)步入普通家庭�����,成為民用的攝影�����、探索利器�。
參考文獻(xiàn)
推薦精選
[1]趙毓. 基于群體智能算法的無(wú)人機(jī)航跡規(guī)劃研究[D].哈爾濱工業(yè)大學(xué),2016
[2]李輝���,蘆利斌�����,金國(guó)棟. 基于Kinect的四旋翼無(wú)人機(jī)體感控制[J]. 傳感器與微系統(tǒng)���,2015,(08):99-102
[3]鄒湘伏���,何清華�����,賀繼林. 無(wú)人機(jī)發(fā)展現(xiàn)狀及相關(guān)技術(shù)[J]. 飛航導(dǎo)彈�����,2006���,(10):9-14.
[4]高倩,徐文.國(guó)外微型無(wú)人機(jī)發(fā)展概況. 飛航導(dǎo)彈���,2003�,(06):14-18
[5]李占科�����,宋筆鋒. 微型飛行器的研究現(xiàn)狀及其關(guān)鍵技術(shù)[J]. 飛行力學(xué)�����,2003�,21(4):124
[6]邱立葳,宋梓山�,沈偉群.用于無(wú)人直升機(jī)著艦系統(tǒng)控制的計(jì)算機(jī)視覺技術(shù)研究[J].航空學(xué)報(bào),2003�,(04).
[7]劉煥業(yè),小型四旋翼飛行器飛行控制系統(tǒng)研究與設(shè)計(jì),碩士學(xué)位論文�����,上海�����,上海交通大學(xué)�,2009
[8]吳森唐,費(fèi)玉華�����。飛行控制系統(tǒng)�。北京航空航天大學(xué)出版社,2005.09
(注:可編輯下載�,若有不當(dāng)之處,請(qǐng)指正�����,謝謝!)
推薦精選
 四旋翼無(wú)人機(jī)前沿報(bào)告
四旋翼無(wú)人機(jī)前沿報(bào)告