《【桂林電子科技大學(xué) 考研真題】808自動(dòng)控制原理(A)(2014-B).docx》由會(huì)員分享�,可在線閱讀�����,更多相關(guān)《【桂林電子科技大學(xué) 考研真題】808自動(dòng)控制原理(A)(2014-B).docx(3頁珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索��。
1�����、桂林電子科技大學(xué)2014年研究生統(tǒng)一入學(xué)考試試題科目代碼:808科目名稱:自動(dòng)控制原理(A)請(qǐng)注意:答案必須寫在答題紙上(寫在試題上無效)�。
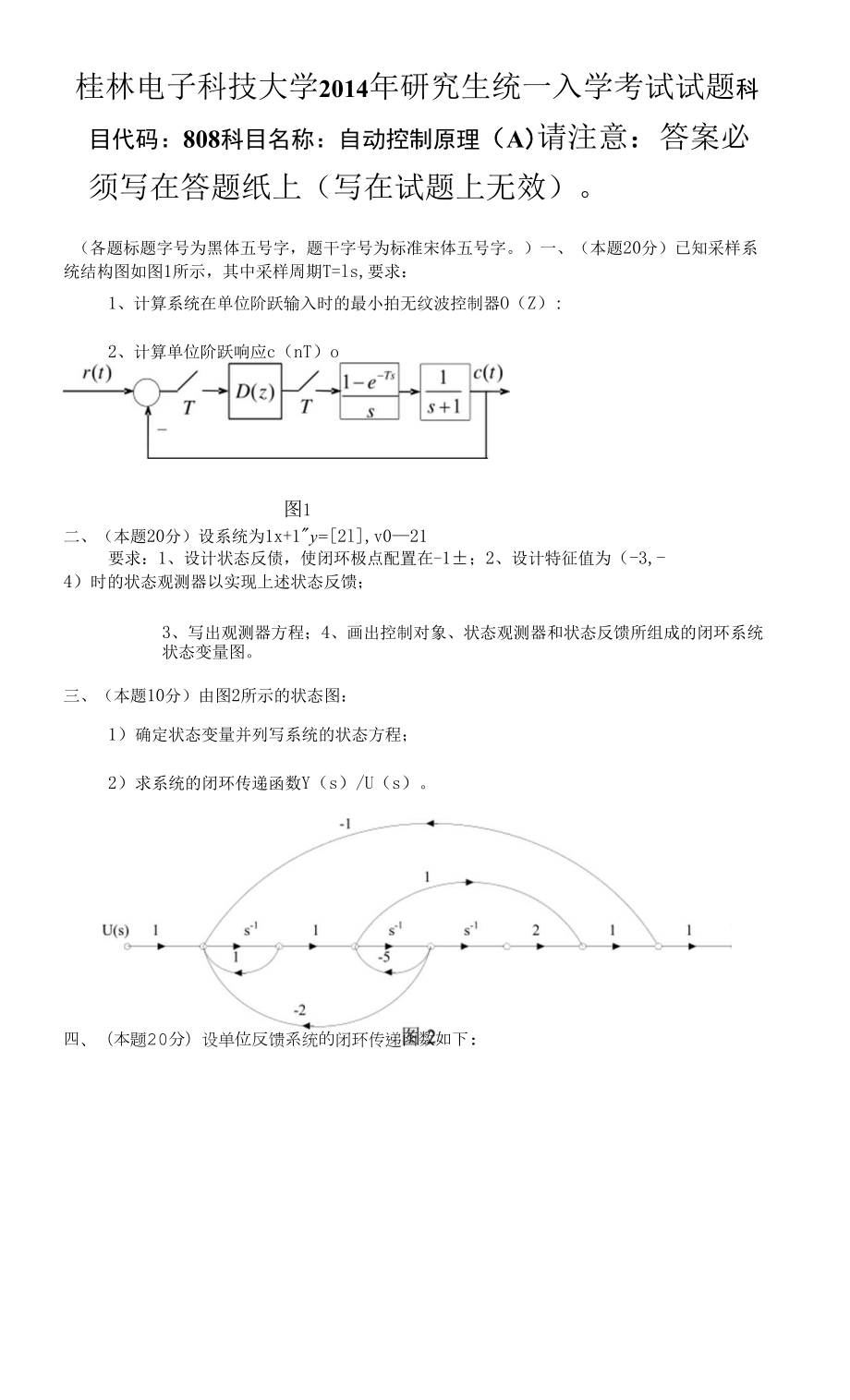
(各題標(biāo)題字號(hào)為黑體五號(hào)字�,題干字號(hào)為標(biāo)準(zhǔn)宋體五號(hào)字�。)一�、(本題20分)已知采樣系統(tǒng)結(jié)構(gòu)圖如圖1所示,其中采樣周期T=ls,要求:
1��、計(jì)算系統(tǒng)在單位階躍輸入時(shí)的最小拍無紋波控制器O(Z):
2��、計(jì)算單位階躍響應(yīng)c(nT)o
圖1
二��、(本題20分)設(shè)系統(tǒng)為1x+1"y=[2l],v0—21
要求:1�����、設(shè)計(jì)狀態(tài)反債�����,使閉環(huán)極點(diǎn)配置在-1±�;2、設(shè)計(jì)特征值為(-3,-4)時(shí)的狀態(tài)觀測(cè)器以實(shí)現(xiàn)上述狀態(tài)反饋���;
3�、寫出觀測(cè)器方程�;4、畫出控制對(duì)
2、象�、狀態(tài)觀測(cè)器和狀態(tài)反饋所組成的閉環(huán)系統(tǒng)狀態(tài)變量圖。
三�、(本題10分)由圖2所示的狀態(tài)圖:
1)確定狀態(tài)變量并列寫系統(tǒng)的狀態(tài)方程;
2)求系統(tǒng)的閉環(huán)傳遞函數(shù)Y(s)/U(s)���。
四���、(本題20分)設(shè)單位反饋系統(tǒng)的閉環(huán)傳遞函數(shù)如下:�
中(s)=
K
$2+10s+100
要求:I)求系統(tǒng)的阻尼比&無阻尼自然振蕩頻率(On;2)超調(diào)量環(huán)%,調(diào)節(jié)時(shí)間���,(A=0.05)���;3)確定輸入為單位階躍信號(hào)的穩(wěn)態(tài)誤差為e.C°」時(shí)的K值。
五���、(本題30分)已知某單位負(fù)反饋控制系統(tǒng)的開環(huán)傳遞函數(shù)為:
G(s)=
s(s+1)(055+1)
要求:1)繪制系統(tǒng)的根軌跡圖(0《K
3���、v+oo);2)分析系統(tǒng)穩(wěn)定時(shí)K的取值范圍:
3)系統(tǒng)滿足0.5<^<1時(shí)的K值范圍�����;4)求阻尼比為6=0.5時(shí)的閉環(huán)傳遞函數(shù)。
六��、(本題20分)已知某單位負(fù)反饋控制系統(tǒng)的開環(huán)傳遞函數(shù)為:
s(s+1)(05$+1)
試確定校正網(wǎng)絡(luò)參數(shù)和電路�,使系統(tǒng)具有:
1)對(duì)單位斜坡輸入的穩(wěn)態(tài)誤差<0.2�;
2)相角裕度/>40%七、(本題30分)已知一帶有飽和特性的非線性系統(tǒng)�,其線性部分的傳遞函數(shù)為:
°⑴—s(2s+l)(0.5s+l)
,A>a,其中K=2,『1
.aaarcsin—+—AA
飽和特性的描述函數(shù)為:
川)=空71
要求:1)作出線性部分的奈魁斯特圖;
2)作出非線性的負(fù)倒描述函數(shù)曲線;
3)分析系統(tǒng)是否存在穩(wěn)定的自恃振蕩:
4)如果是穩(wěn)定的自恃振蕩,則求自侍振蕩的頻率和振幅o
 【桂林電子科技大學(xué) 考研真題】808自動(dòng)控制原理(A)(2014-B).docx
【桂林電子科技大學(xué) 考研真題】808自動(dòng)控制原理(A)(2014-B).docx