《過(guò)程控制系統(tǒng) 復(fù)習(xí)總結(jié)!》由會(huì)員分享�����,可在線閱讀���,更多相關(guān)《過(guò)程控制系統(tǒng) 復(fù)習(xí)總結(jié)!(17頁(yè)珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索�。
1、
過(guò)程控制系統(tǒng)知識(shí)點(diǎn)總結(jié)
)
一��、概論
1����、過(guò)程控制概念:五大參數(shù)。
溫度���、壓力����、流量��、液位和成分等工藝參數(shù)作為被控變過(guò)程控制的定義:工業(yè)中的過(guò)程控制是指以量的自動(dòng)控制����。
2����、簡(jiǎn)單控制系統(tǒng)框圖。
控制儀表的定義:接收檢測(cè)儀表的測(cè)量信號(hào)���,控制生產(chǎn)過(guò)程正常進(jìn)行的儀表�。主要包括:控制器、變送器����、運(yùn)算器、執(zhí)行器等���,以及新型控制儀表及裝置��。
控制儀表的作用:對(duì)檢測(cè)儀表的信號(hào)進(jìn)行運(yùn)算����、處理���,發(fā)出控制信號(hào)����,對(duì)生產(chǎn)過(guò)程進(jìn)行控制����。
給定值操縱量被控量
被控對(duì)象控制器執(zhí)行器-變送器
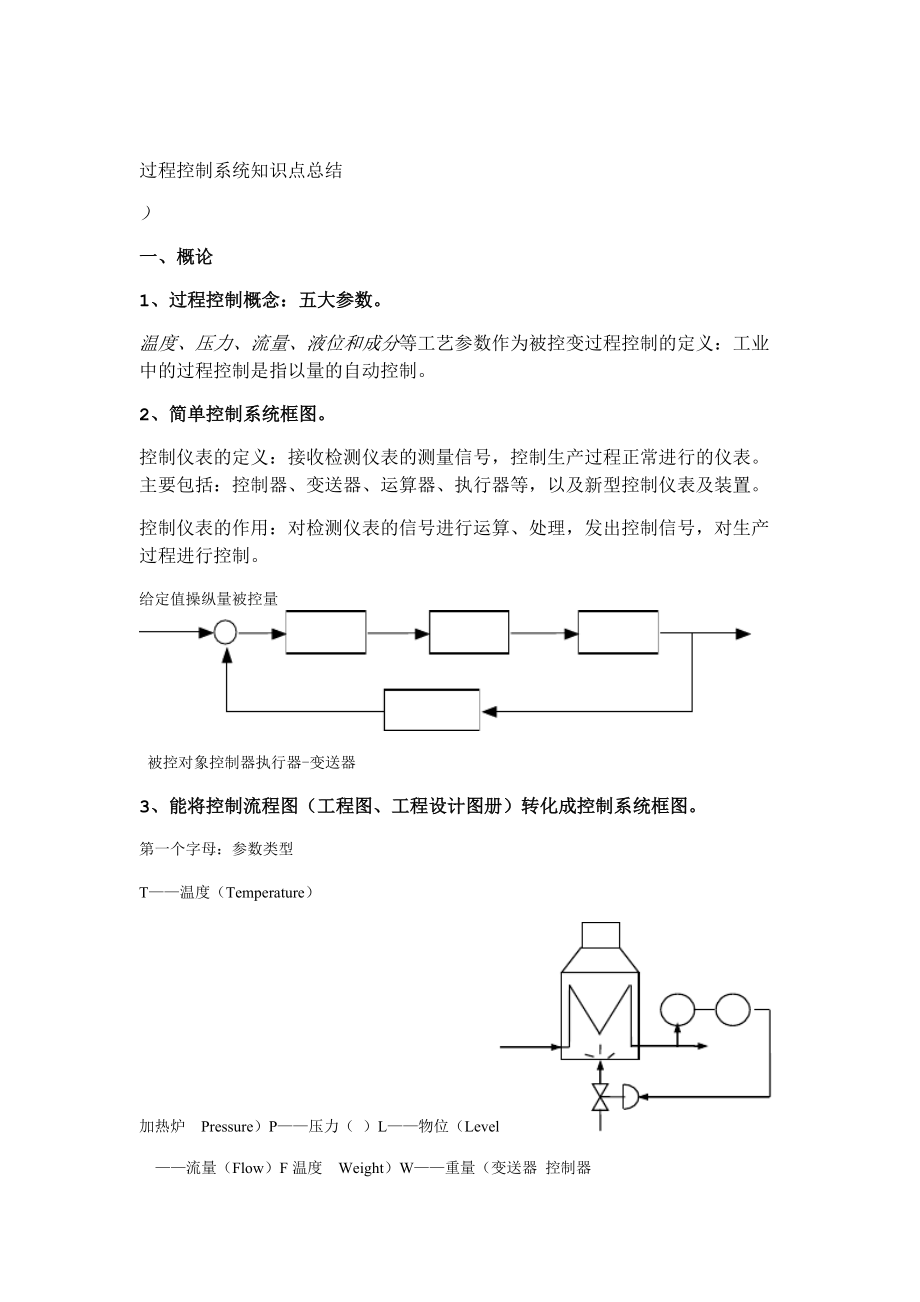
3、能將控制流程圖(工程圖��、工程設(shè)計(jì)圖冊(cè))轉(zhuǎn)化成控制系統(tǒng)框圖。
第一個(gè)字母:參數(shù)類型
2���、
T——溫度(Temperature)
加熱爐 Pressure)P——壓力( )L——物位(Level
——流量(Flow)F溫度 Weight)W——重量(變送器 控制器
第二個(gè)字母:功能符號(hào)TT TC
transmitter)T——變送器(原料
Controller)C——控制器( )——指示器(IndicatorI執(zhí)行器 記錄儀(R——Recorder)燃料 報(bào)警器(Alarm)A——
4��、DDZ-Ⅲ型儀表的電壓信號(hào)制�,電流信號(hào)制�����。QDZ-Ⅲ型儀表的信號(hào)制��。它們之間聯(lián)用要采用電氣轉(zhuǎn)換器���。
5����、電信號(hào)的傳輸方式����,各自特點(diǎn)�。
電
3、壓傳輸特點(diǎn):
1). 某臺(tái)儀表故障時(shí)基本不影響其它儀表�����;
2). 有公共接地點(diǎn);
3). 傳輸過(guò)程有電壓損耗���,故電壓信號(hào)不適宜遠(yuǎn)傳��。
電流信號(hào)的特點(diǎn):
1).某臺(tái)儀表出故障時(shí)�����,影響其他儀表�;
2).無(wú)公共地點(diǎn)���。若要實(shí)現(xiàn)儀表各自的接地點(diǎn),則應(yīng)在儀表輸入�、輸出端采取直流隔離措施����。
6、變送器有四線制和二線制之分����。區(qū)別。
1����、四線制:電源與信號(hào)分別傳送�����,對(duì)電流信號(hào)的零點(diǎn)及元件的功耗無(wú)嚴(yán)格要求��。2�、兩線制:節(jié)省電纜及安裝費(fèi)用�����,有利于防爆�。活零點(diǎn)�,兩條線既是信號(hào)線又是電源線。
7����、本安防爆系統(tǒng)的2個(gè)條件。
1�、在危險(xiǎn)場(chǎng)所使用本質(zhì)安全型防爆儀表。2����、在控制室儀表與
4、危險(xiǎn)場(chǎng)所儀表之間設(shè)置安全柵��,以限制流入危險(xiǎn)場(chǎng)所的能量���。
8�����、安全柵的作用���、種類。
安全柵的作用:
.
1��、安全柵作為本安儀表的關(guān)聯(lián)設(shè)備�,可用于傳輸信號(hào)。
2����、控制流入危險(xiǎn)場(chǎng)所的能量在爆炸性氣體或混合物的點(diǎn)火能量以下,
以確保系統(tǒng)的本安防爆性能�。
安全柵的種類:齊納式安全柵、隔離式安全柵
二�����、基型調(diào)節(jié)器
1、基型調(diào)節(jié)器組成:控制單元和指示單元���?����;驼{(diào)節(jié)器控制單元構(gòu)成���。
基型控制器又稱基型調(diào)節(jié)器,對(duì)來(lái)自變送器的1-5V直流電壓信號(hào)與給定值相比較所產(chǎn)生的偏差進(jìn)行PID運(yùn)算��,輸出4-20mA(DC)直流控制信號(hào)�。
控制單元:輸入電路(偏差差動(dòng)和電平移動(dòng)電路
5、)����、PID運(yùn)算電路(由PD與PI運(yùn)算電路串聯(lián))、輸出電路(電壓�、電流轉(zhuǎn)換電路)以及硬、軟手操電路�����;
指示單元:測(cè)量信號(hào)指示電路、設(shè)定信號(hào)指示電路����。
2�、測(cè)量信號(hào)、內(nèi)給定信號(hào)范圍�;外給定信號(hào)范圍。
測(cè)量和內(nèi)給定信號(hào):1~5V(DC)����;
外給定信號(hào):4~20mA直流電流。(它經(jīng)過(guò)250Ω精密電阻轉(zhuǎn)換成1~5V直流電壓)
3����、輸入電路、輸出電路的作用��。
輸入電路作用:
1). 信號(hào)綜合���。將(U-U)后放大兩倍反相以U輸出�,即 U= -2(U-U)��。 ssio1io12). 電平轉(zhuǎn)換�。將以0V為基準(zhǔn)的輸入信號(hào)轉(zhuǎn)換為以U(10V)為基準(zhǔn)的輸出信號(hào)U。 o1B電平轉(zhuǎn)換的目的:使
6、運(yùn)算放大器工作在允許的共模輸入電壓范圍內(nèi)����。
輸出電路作用:把PID輸出ΔU (以UB為基準(zhǔn))轉(zhuǎn)換成4-20mA.DC輸出。實(shí)現(xiàn)電壓—電流轉(zhuǎn)換��。 o34��、放大系數(shù)和比例度�����。
比例度比例度的一般表達(dá)式:? ???輸入的相對(duì)變化?minmax??% ?100 y?輸出的相對(duì)變化 yy?minmax式中: ??偏差變化范圍�;?—minmax輸出信號(hào)變化范圍?�!?yyminmax???y?在單元組合儀表中����,y?。此時(shí)比例度minminmaxmax可表示為:1??100 %? KP??愈小�����,K愈大����,比例作用就越強(qiáng)��。即成反比����,與KPP5����、基型調(diào)
7��、節(jié)器PD電路的階躍響應(yīng)曲線形狀����;比例分量;t=TD/KD時(shí)的微分分量��;微分時(shí)間�。
?U進(jìn)行PD運(yùn)算,可設(shè)置T ���、 K (或比例度)�。作用:對(duì)T 為微分時(shí)間�����;K為比例系數(shù)。 PPDo1D. 2
.
? 比例系數(shù):KDC=nR微分時(shí)間:TD DD? 調(diào)整R(R)和Dp 可改變比例度和微分時(shí)間�。
微分作用:快速的調(diào)節(jié)作用,超前作用����。時(shí)的積分分量;積分時(shí)PI電路的階躍響應(yīng)曲線形狀���;比例分量: Kc=CI/CM�;t=TI6��、基型調(diào)節(jié)器 間��。
�、積分飽和。7限制積分對(duì)控制器的輸出加以限幅�����,使其不超過(guò)額定的最大值或最小值����;2)解決積分飽和辦法:1) 3)切除積分作用���。電容兩
8、端的充電電壓�����; ��、微分時(shí)間對(duì)微分作用的影響�����,積分時(shí)間對(duì)積分作用的影響�。8 微分時(shí)間越小��,微分作用越強(qiáng)����;積分時(shí)間越大,積分作用越強(qiáng)���。 ����、軟手操電路和硬手操電路。9 軟手動(dòng)操作電路是積分電路��。硬手動(dòng)操作電路是比例電路���。作業(yè)
時(shí)����,輸入變化4mA~20mA�����,輸出信號(hào)為1V~5V�,當(dāng)比例度δ=60%P2-4 某控制器的輸入信號(hào)是 所引起的輸出變化是多少?0.6mA 解:根據(jù)比例度的公式:x?x?xmaxmin? % 100?? ?yy?yminmax.
3
.
得
?x10.61 V250.?1)?)(yy ?? ?y??(5 minmax?20?460x?xminmax2
9��、-7 某PID控制器(正作用)輸入��、輸出信號(hào)均為4mA~20mA�,控制器的初始值Ii=Io=4mA,δ=200%���,T=T=2min��,K=10�。在t=0時(shí)輸入⊿Ii=2mA的階躍信號(hào),分別求取t=12s時(shí):①PI工況下DDI的輸出值���;②PD工況下的輸出值����。
解:①PI工況下
11 =P分量mA?1??I2??I?K iPi?%200Ti時(shí):P分量=I分量�����;則Ti時(shí)����,PI分量=2mA
Ti=260=120s
?IPI
oI分量2P分量10T12st(s)i
PI直線過(guò)(0,1)和(120����,2)兩點(diǎn)
2?1 時(shí)的輸出變化量為:則t=12smA11.1??I12??? o
10����、0120??I=4+1.1=5.1mA
初值+t=12s時(shí)的輸出為Io=o①PD工況下
11 =P分量mA?1?2K??I?I? iiP?%200??mA1?I? 解得 P分量= 5? iKDT2?60D??12s 10KD?I(mA)
D368I分量0T/K=12t(s)DD
K?1?D?I?P分量368?I0?. 時(shí)的輸出變化量為:t=12s則 ioKD. 4
.
1?10 時(shí)的輸出為:Io=初值+=t=12sI?mA3128?.3681?.?5?24?0o10 三、變送器 1��、變送器的結(jié)構(gòu)�����。變送器的作用。構(gòu)成原理:變送器是基于負(fù)反饋原理工作的�����,其構(gòu)成原
11�����、理如圖所示�����,它包括測(cè)量部分(既輸入轉(zhuǎn)換 部分)����、放大器和反饋部分。零點(diǎn)調(diào)整
z 0+
y
z x
測(cè)量部分放大器+
iC
K -
-
反饋部分 zfF
和電信號(hào)(如電壓���、電)是分別將各種工藝變量(如溫度�、壓力���、流量�����、液位變送器和轉(zhuǎn)換器的作用 流����、頻率、氣壓信號(hào)等)轉(zhuǎn)換成相應(yīng)的統(tǒng)一標(biāo)準(zhǔn)信號(hào)����,以供顯示、記錄和控制之用�。 2、變送器的輸入輸出關(guān)系���。 )?Fy(Cx?zzK?(z?z?)?Ky0f0i3���、量程調(diào)整的目的;零點(diǎn)調(diào)整/遷移�。
使變送器的輸出信號(hào)下限值y與測(cè)量范圍的下限值x相對(duì)應(yīng)����,在x=0時(shí),稱為零點(diǎn)調(diào)整,在minminminx≠0時(shí)����,稱為
12、零點(diǎn)遷移���。零點(diǎn)調(diào)整使變送器的測(cè)量起始點(diǎn)為零��。零點(diǎn)遷移是把測(cè)量的起始點(diǎn)由零遷移min到某一數(shù)值�。
4�����、差壓變送器的作用��;差動(dòng)變壓器的作用���。
差壓變送器是將液體�����、氣體或蒸汽的壓力����、流量、液位等工藝變量轉(zhuǎn)換成統(tǒng)一的標(biāo)準(zhǔn)信號(hào)����,作為指示記錄儀、調(diào)節(jié)器或計(jì)算機(jī)裝置的輸入信號(hào)�����,以實(shí)現(xiàn)對(duì)上述變量的顯示��、記錄或自動(dòng)控制����。
差動(dòng)變壓器是由檢測(cè)片(銜鐵)、上�����、下罐形磁芯和四組線圈構(gòu)成�。其作用是將檢測(cè)片的位移s轉(zhuǎn)換成相應(yīng)的電壓信號(hào)u。 CD
����;四線制溫度變送器的特點(diǎn)。5�����、溫度變送器的品種�、結(jié)構(gòu)(量程單元和放大單元).
5
.
各類變送器分為三個(gè)品種:直流毫伏變送器、熱電偶溫度變
13����、送器和熱電阻溫度變送器。 四線制溫度變送器有如下特點(diǎn): )主放大器為低漂移��、高增益的運(yùn)算放大器����,使儀表具有良好的可靠性和穩(wěn)定性。(1)在熱電偶和熱電阻溫度變送器中采用了線性化電路�����,從而使變送器的輸出信號(hào)和被測(cè)溫度呈2( 線性關(guān)系���,便于指示和記錄�����。)變送器的輸入���、輸出之間具有隔離變壓器��,采用了安全隔離變壓器���,并采用了安全火花防爆3( 措施,故具有良好的抗干擾性能���,且能測(cè)量來(lái)自危險(xiǎn)場(chǎng)所的直流毫伏或溫度信號(hào)��。 �、熱電偶溫度變送器以及熱電阻溫度變送器的量程單元���。6 �、氣動(dòng)儀表的基本元件����。7 等基本元件組成。擋板機(jī)構(gòu)和功率放大器由氣阻���、氣容�����、彈性元件�、噴嘴- 、彈性元件�����、噴嘴擋板機(jī)構(gòu)���、電氣轉(zhuǎn)換器。8 彈
14���、性元件作用:將壓差轉(zhuǎn)換成位移�����,在儀器的連接處產(chǎn)生一定的操作力����。 噴嘴擋板機(jī)構(gòu)作用:將微小的位移轉(zhuǎn)換成相應(yīng)的壓力信號(hào)����。 氣轉(zhuǎn)換器工作原理是基于力矩平衡原理工作的。電/ 四�、運(yùn)算器和執(zhí)行器 1�����、開方器應(yīng)用場(chǎng)合��、作用���。開方器主要應(yīng)用在流量測(cè)量與控制系統(tǒng)中,開方器對(duì)差壓變送器的輸出信號(hào)進(jìn)行開方運(yùn)算�,從而得 到與被測(cè)流量成比例關(guān)系的電壓或電流信號(hào)。 2���、執(zhí)行器的結(jié)構(gòu)��、分類���。 執(zhí)行器分為兩部分:執(zhí)行機(jī)構(gòu)和調(diào)節(jié)機(jī)構(gòu)。
→Q 氣動(dòng)執(zhí)行器 P→Lλ
電動(dòng)執(zhí)行器 I→L→Q 按能源分: 直行程(直線位移) i角行程(角位移)
(兩者減速器不同)
15���、液動(dòng)執(zhí)行器
3����、角行程電動(dòng)執(zhí)行機(jī)構(gòu)的結(jié)構(gòu)。
~220V
A024~m? I 器服電減伺器機(jī)速伺服放大 i I??0~90 f 饋反位置 放器大2Q1Q
器作操
位閥 示指
器位發(fā)置送
角行程電動(dòng)執(zhí)行機(jī)構(gòu)方框圖
構(gòu)執(zhí)行機(jī)
4�、標(biāo)準(zhǔn)氣壓信號(hào)范圍(20kPa-100kPa),氣源信號(hào)(140kPa)�����。
5�、氣動(dòng)執(zhí)行機(jī)構(gòu)的種類。
氣動(dòng)執(zhí)行機(jī)構(gòu)有薄膜式和活塞式兩種�,常見的氣動(dòng)執(zhí)行機(jī)構(gòu)均屬薄膜式��。薄膜式特點(diǎn)為:結(jié)構(gòu)簡(jiǎn)單�、動(dòng)作可靠、維修方便��、價(jià)格低��,但輸出行程較
16���、小�,只能直接帶動(dòng)閥桿���。
6�、調(diào)節(jié)閥的正反作用���、正裝閥/反裝閥���、氣開/氣關(guān)���。
. 6
.
/、氣開閥氣關(guān)閥的選擇原則����。7調(diào)節(jié)閥氣開、氣關(guān)閥選擇�,主要根據(jù)工藝生產(chǎn)的需要和安全要求來(lái)決定的;原則是當(dāng)信號(hào)壓力中斷時(shí)��,應(yīng)能確保工藝設(shè)備和生產(chǎn)的安全����。如果閥門處于全開位置安全性高,則應(yīng)選用氣關(guān)閥����,反之,則應(yīng) 選用氣開閥��。 8、閥門定位器的作用���。閥門定位器可以增加執(zhí)行器的輸出功率�����,減小信號(hào)傳遞滯后���,加快閥桿的位移速度,提高線性度����, 克服摩擦力影響�,保證閥位正確到位。 9�、控制閥的工作原理;流量特性�����;理想流量特性��、工作流量特性����。從而改變流通阻力以達(dá)到控控制閥體就是依據(jù)執(zhí)行機(jī)構(gòu)輸出的推桿
17���、位移量來(lái)改變閥門的開啟程度,制流體介質(zhì)流量的目的��??刂崎y的流量特性,是指控制介質(zhì)流過(guò)閥門的相對(duì)流量與閥門相對(duì)開度(即推����。工桿的相對(duì)位移)之間的函數(shù)關(guān)系。理想流量特性:閥前后差壓不變時(shí)的流量特性(固有流量特性) 作流量特性:閥裝在管道中��,前后差壓變時(shí)的流量特性�����,也叫實(shí)際流量特性�����。 ���、控制閥的流量特性類型���、各自特點(diǎn)��。10 理想流量特性����,通常有四種典型形式: 流量與閥芯位移成直線關(guān)系��;(1)直線特性- (2)對(duì)數(shù)特性-流量與閥芯位移成對(duì)數(shù)關(guān)系�����,引起的流量變化的百分比相等���; 3)快開特性-開度較小時(shí)流量變化較大��,隨開度增大很快達(dá)到最大值�。(介于直線流量特性與對(duì)數(shù)流量特性之間���,從而彌補(bǔ)了直線流量特性小開
18、度時(shí)控制(4-)拋物線特性 性能差的特點(diǎn)�。 。11�����、控制閥的可調(diào)比(可控比)Qaxm為流量下限,不是泄R=��,可調(diào)比(可控比)���,即閥所能控制的流量上限與流量下限之比�����。QminQinm 漏����。 12��、控制閥串聯(lián)管道工作流量特性的特點(diǎn)�����。P??P??P? 閥前后壓差始終不變�。 S=1,理想流量特性�。全關(guān)系統(tǒng)全開?直線變?yōu)榭扉_;P??????S?�����,特性曲線下移,流量特性畸變�。 閥.
7
對(duì)數(shù)變?yōu)橹本€ ;
.
太小����,流量變化范圍減小,對(duì)控制不利���。S ���。S一般不小于0.3 、控制閥出廠時(shí)標(biāo)注的為理想流量特性����。13 五、過(guò)程控制系統(tǒng)緒論 �����、控制通道�����、干擾通道�。1。干擾通道:被控量與擾動(dòng)之間控制通
19��、道:被控量與輸入控制作用之間的聯(lián)系被稱為“控制通道” ��。的聯(lián)系被稱為“干擾通道” �����、過(guò)程控制系統(tǒng)的組成���。2 ��。3�、控制器正反作用的確定依據(jù):(控制器)(對(duì)象)=(—) 4����、過(guò)程控制系統(tǒng)按設(shè)定值的形式分類。 定值控制系統(tǒng)�����、隨動(dòng)控制系統(tǒng)���、程序控制系統(tǒng) 5����、過(guò)程控制系統(tǒng)的品質(zhì)指標(biāo)??刂茣r(shí)間、(最大偏差����、最大過(guò)調(diào)量、超調(diào)量)�����、調(diào)整時(shí)間 Tc (遞減比n(衰減比)��、動(dòng)態(tài)偏差B1
�����、靜態(tài)偏差C(余差����、殘余偏差)。過(guò)渡過(guò)程時(shí)間、恢復(fù)時(shí)間) 六����、過(guò)程建模 �、自平衡能力。1自平衡能力:凡受到干擾后��,不依靠外加控制作用就能重新達(dá)到平衡狀態(tài)的對(duì)象��,是具有自平衡能 力的對(duì)象�����。否則���,是無(wú)自平衡能力的對(duì)象���。 2
20、�、過(guò)程控制系統(tǒng)被控對(duì)象特性三個(gè)參數(shù):放大系數(shù)、時(shí)間常數(shù)�、滯后時(shí)間的求取。 3��、阻力和容量的影響。具有的阻力����,綜上所述,不同過(guò)程所 QQ?Q?i時(shí)����,對(duì)流量的影響。就是被控量y發(fā)生變化Q即Q?3idyQ?R - (215)idQ0tt0:阻力R與T����、K的關(guān)系hTR 以水箱為例:T?RC,K?k)?h(3x3T1)(h?及時(shí)間常因此�,阻力與放大系數(shù)11T32數(shù)有關(guān)。)h?(22靜態(tài):影響放大倍數(shù)
6�。 見圖2影響響應(yīng)速度, -動(dòng)態(tài): h0����,T較小,一般希望對(duì)象阻力小些 0tt0控制效果���。響應(yīng)快�,以獲得較好的阻力對(duì)響應(yīng)特性的影響2-6
21��、圖靜態(tài)。阻力既影響動(dòng)態(tài)又影響
���。2-8見圖容量增大�����,屬于動(dòng)態(tài)參數(shù)。容量只影響反應(yīng)速度����,不影響放大系數(shù),T=RC響應(yīng)過(guò)程相對(duì)增長(zhǎng)����。 C↑?��!鶷.
8
.
4�����、多容過(guò)程等效為單容過(guò)程�����。
?AQ???Q?? 112??AQ?Q??? 223??h??1??Q2?R1?h?2?Q?? 3R?2?x?k?Q??x1 拉氏變換得:
(s)?(s)QAsH?(s)Q?1112?(s)QA?(s)?(s)QsH?2322(s)H?1?Q(s)? 2R?1?(s)H2?(s)Q?3R?2?X(s)?(s
22�、)kQ?x1
(s)H(s)Q(s)HX(s)211121kxsARsA211(s)Q--(s)Q321R2
. 9
.
111RkKs)H(RAAss2x2121??k? x1111R)()s(R1As?A)?(Ts?1X(s))(?Ts11)(1??)(1122121RARAss2112R?kAT?RAK?TR 22211x12 、時(shí)域法過(guò)程建模�,單容水箱以及雙容水箱的過(guò)程傳遞函數(shù)。5KH(S)?)?1. 單容對(duì)象的傳遞函數(shù): W(S1Ts?(S)XK?s?e? 2.有純滯后單容對(duì)象的傳遞函數(shù):W(S)01?TsK?(S)3. 雙容對(duì)象的傳遞函數(shù):
23�、 W21)SSTT??(T?T2211K?) 或 W(S)1T(TS?1)(S?21K?S?e?W(S) 4.有純滯后雙容對(duì)象的傳遞函數(shù): 0)(TS?1)(T1S?21K?) W(S多容對(duì)象的傳遞函數(shù):5. )TS?1?)?????(T(TS?1)(S?1n12K?S?e?W(S) 6. 帶有純滯后多容對(duì)象的傳遞函數(shù):0)??1?S1)(T(TS1(TS?)?????n12K?(S).7 等容對(duì)象的傳遞函數(shù): Wn)?1(TS K?S?eS W()
24、?8. 帶有純滯后等容對(duì)象的傳遞函數(shù):0n)1TS?(作業(yè)
�����。Q2Q1為輸入���,為輸出����,求Q2(s)/Q1(s)R21����、如圖所示單容水箱,負(fù)載閥的流阻為?��,F(xiàn)以
hd??)s?(sQ()?Qs)CsH(C?Q???Q??2121??dt)Hs( ))(Q)(s?s?(QsQCsR??h??(Qs)21222?Q???R?2?R2?2.
10
.
1)1Q(s2 ??CT?R21sQ(s)CR?1Ts?21
對(duì)應(yīng)的流阻分別���。2���、如圖所示,已知一單容水箱其底面積為C�,輸入為Qi,輸出為hQo1和Qo2 為
25�����、R1和R2��,求H(s)/Qi(s)����。
??h?dC??Q??Q??Q??)s?Q(s)CsH()sQ()?Q(s?2i1oodt??2oio1)sH(?h???s)??Q(Q ??1o1oRR??11h?)sH(???Q??Q()s??2o2oRR??22
)ssH()H( )s??)(Qs?CsH(iRR21RR21K1H(s)R?R21??? 1RRCs11)?TsQ(s211Cs???iRRRR?2112RRRR2121 CKT??RR?RR?2112
七���、單回路控制系統(tǒng)����、干擾通道時(shí)間常數(shù)�����、純滯后時(shí)間��、控制通道時(shí)
26、間常數(shù)�、純滯后時(shí)間控制通道)、放大系數(shù)(干擾通道1/ 對(duì)控制質(zhì)量的影響�����。 極點(diǎn)的影響: Td)增大�����,過(guò)程變慢���,過(guò)渡過(guò)程時(shí)間加長(zhǎng)�。1 )使過(guò)渡過(guò)程動(dòng)態(tài)分量減小了2Td 倍����,即超調(diào)量減小,控制質(zhì)量提高�。.
11
.
結(jié)論:
干擾通道的時(shí)間常數(shù)大,或者慣性環(huán)節(jié)數(shù)增加時(shí)���,控制質(zhì)量將提高����。(對(duì)干擾起濾波作用。)
2���、選擇操縱量的一般原則�。
直接參數(shù):能表征產(chǎn)品產(chǎn)量����、質(zhì)量、安全性能等方面的參數(shù)�����。間接參數(shù):與直接參數(shù)具有單值關(guān)系(P��、T等)��,并有足夠靈敏度���。
3、控制閥的流量特性的選擇�。
確定工作流量特性的原則:使廣義對(duì)象具有線性特性。即:K=KvKo=常數(shù)����。
4��、控制
27�、閥的口徑計(jì)算步驟�����。
1�����、根據(jù)現(xiàn)有的生產(chǎn)能力����、設(shè)備負(fù)荷及介質(zhì)的狀況,決定計(jì)算的最大工作流量Qmax和最小工作流量Qmin����。
2、根據(jù)系統(tǒng)特點(diǎn)選擇S值��,然后計(jì)算控制閥全開時(shí)的壓差�����。
3���、根據(jù)控制介質(zhì)類型和工況��,選用合適的C值計(jì)算公式��,求取最大最小流量時(shí)的流通能力Cmax��、Cmin�。
4、根據(jù)Cmax值�����,在所選用的產(chǎn)品形式的標(biāo)準(zhǔn)系列中����,選取大于Cmax并接近的一檔C值,獲得口徑值��。見表3-6����。
5����、開度驗(yàn)算���。
6、實(shí)際可控比驗(yàn)算���。
7����、上述各項(xiàng)合格����,則所選控制閥口徑合格,否則����,需重定C值和口徑,再驗(yàn)算至合格���。
5�����、控制器的選型���。PID的作用�����。
P控制器的選型:
28�����、
特點(diǎn):快��,輸出與偏差成比例�,閥門開度與偏差有對(duì)應(yīng)關(guān)系���,有余差��?�?关?fù)荷干擾能力強(qiáng)����,調(diào)節(jié)時(shí)間短�。
適用場(chǎng)合:適用于控制通道滯后小,負(fù)荷變化不大�����,允許被控量在一定范圍內(nèi)變化的系統(tǒng)��。如:壓縮機(jī)儲(chǔ)壓罐的壓力控制系統(tǒng)���;儲(chǔ)液槽的液位控制系統(tǒng):串級(jí)控制系統(tǒng)的副回路��。
PI控制器的選型:
特點(diǎn):I可消除余差���,但穩(wěn)定性低。引入I后��,Kc↓(?↑)��,可保持原穩(wěn)定性����,但過(guò)渡過(guò)程變長(zhǎng)。
適用場(chǎng)合:適用于控制通道滯后小�,負(fù)荷變化不大,被控量不允許有余差的場(chǎng)合���。如:流量���、壓力系統(tǒng)����。
PID控制器的選型:
特點(diǎn):D對(duì)克服容量滯后有明顯的效果����,D使穩(wěn)定性提高,最大偏差減?���。籌消除余差�����;P作用快速有效���。
29��、
適用場(chǎng)合:適用于容量滯后較大��,負(fù)荷變化較大����,被控量不允許有余差的場(chǎng)合。如:溫度���、ph值系統(tǒng)等。
對(duì)于負(fù)荷變化很大�,純滯后又較大的系統(tǒng),應(yīng)采用復(fù)雜的控制方案�。
6、控制器參數(shù)整定方法�。
經(jīng)驗(yàn)湊試法、臨界比例度法����、衰減曲線法(4:1或10:1)、響應(yīng)曲線法��。
7�、遞減率和遞減指數(shù)。P177
8����、根平面中質(zhì)量合格區(qū)域。
. 12
.
9���、經(jīng)驗(yàn)湊試法���、臨界比例度法��、衰減曲線法(4:1或10:1)�����、響應(yīng)曲線法��。
經(jīng)驗(yàn)湊試法:簡(jiǎn)單可靠�,適用于各種系統(tǒng)��。但反復(fù)湊試�,花時(shí)間多。是“看曲線��、調(diào)參數(shù)”的方法�����,整定質(zhì)量因人而異�����。經(jīng)驗(yàn)豐富的人用次法更合適����。
臨界比
30�����、例度法:簡(jiǎn)單易掌握��,整定質(zhì)量較好。對(duì)臨界比例度很小或過(guò)渡過(guò)程不允許出現(xiàn)等幅振蕩的系統(tǒng)不適用�����。
衰減曲線法:安全�����、準(zhǔn)確����、可靠,整定質(zhì)量較高����。對(duì)于干擾頻繁或由各種原因難于從曲線上判別遞減比和衰減周期的系統(tǒng)不適用。
響應(yīng)曲線法:整定質(zhì)量高����,但要求測(cè)響應(yīng)曲線�����。
八��、串級(jí)控制系統(tǒng)
1����、術(shù)語(yǔ):主/副變量����、主/副控制器、主/副對(duì)象�、主/副回路、主/副變送器�。P189
2、主對(duì)象以及副對(duì)象的輸入和輸出信號(hào)�����。
3�����、一次干擾和二次干擾。
4��、串級(jí)控制系統(tǒng)的特點(diǎn)�。
5、串級(jí)控制系統(tǒng)中副變量的選擇原則��。
6��、串級(jí)控制系統(tǒng)中主/副控制器正反作用的判斷�。
31、
7����、串級(jí)控制系統(tǒng)參數(shù)整定方法��。
九�、其它控制系統(tǒng)
1、比值控制系統(tǒng)的類型�。
2、比值控制系統(tǒng)比值系數(shù)折算的目的�����。比值系數(shù)的折算���。
3����、前饋控制系統(tǒng)。前饋控制與反饋控制的區(qū)別�����。
4�、前饋控制器的設(shè)計(jì),實(shí)現(xiàn)完全補(bǔ)償�。
5、分程控制的概念��,與非分程控制的區(qū)別����。
6、分程控制的應(yīng)用場(chǎng)合�。
.
13
.
、選擇性控制系統(tǒng)的設(shè)計(jì)步驟����。7
、選擇性控制系統(tǒng)中產(chǎn)生積分飽和的條件,及防止積分飽和的辦法���。8
Smith預(yù)估補(bǔ)償器的結(jié)構(gòu)���、特點(diǎn)。9��、大滯后控制系統(tǒng)�。
、多變量解耦控制�����。求相對(duì)增益矩陣���,選擇合適的變量配對(duì)。10
����、解耦補(bǔ)償器的設(shè)計(jì):串聯(lián)補(bǔ)償解耦設(shè)計(jì)和前饋補(bǔ)償解耦設(shè)計(jì)。11
. 14
 過(guò)程控制系統(tǒng) 復(fù)習(xí)總結(jié)!
過(guò)程控制系統(tǒng) 復(fù)習(xí)總結(jié)!