《《現(xiàn)代控制理論》第3版課后習(xí)題答案-》由會(huì)員分享���,可在線閱讀,更多相關(guān)《《現(xiàn)代控制理論》第3版課后習(xí)題答案-(34頁(yè)珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索���。
1��、《現(xiàn)代控制理論參考答案》
第一章答案
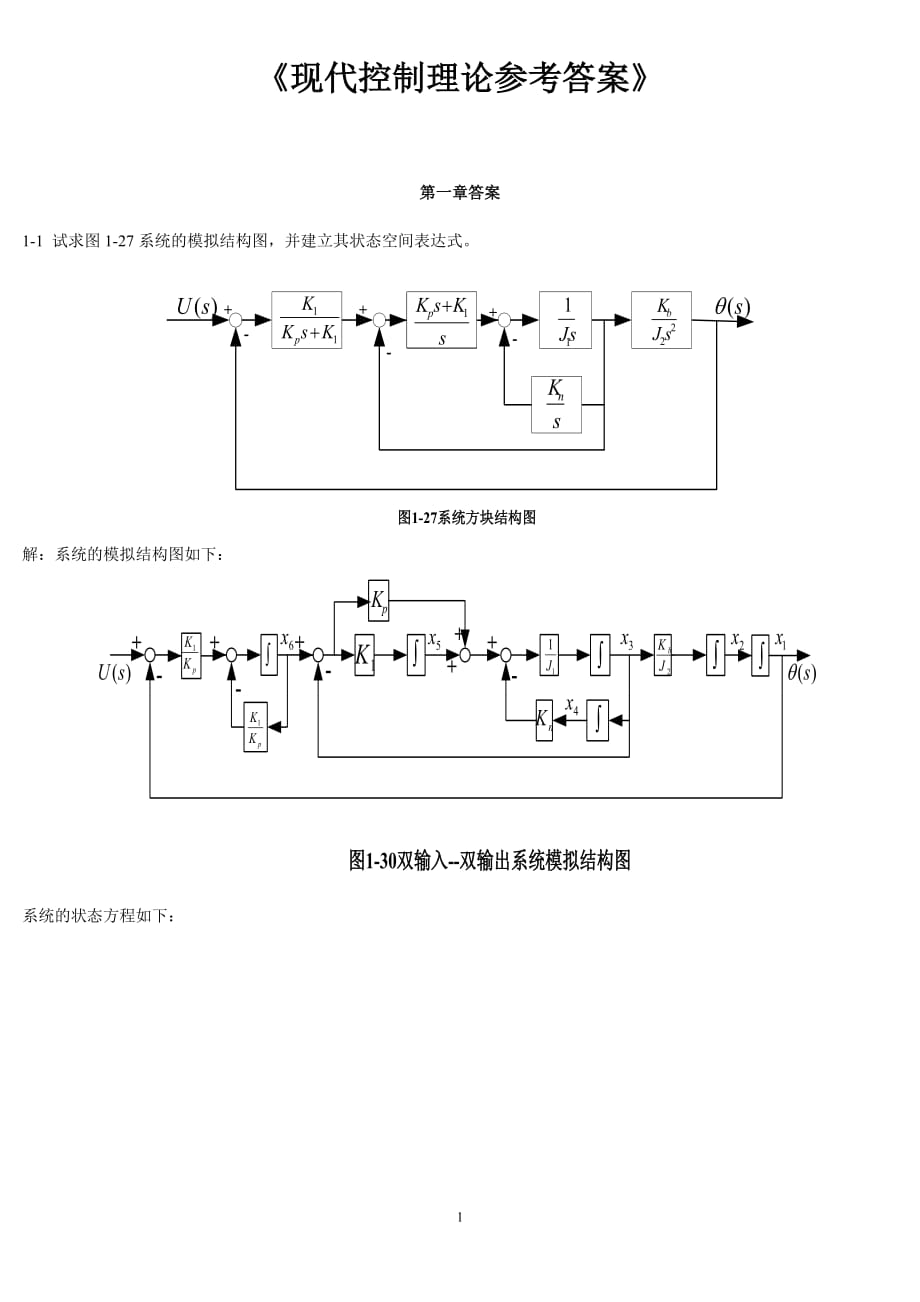
1-1 試求圖1-27系統(tǒng)的模擬結(jié)構(gòu)圖��,并建立其狀態(tài)空間表達(dá)式�。
解:系統(tǒng)的模擬結(jié)構(gòu)圖如下:
系統(tǒng)的狀態(tài)方程如下:
令��,則
所以��,系統(tǒng)的狀態(tài)空間表達(dá)式及輸出方程表達(dá)式為
1-2有電路如圖1-28所示���。以電壓為輸入量��,求以電感中的電流和電容上的電壓作為狀態(tài)變量的狀態(tài)方程�,和以電阻上的電壓作為輸出量的輸出方程。
解:由圖��,令��,輸出量
有電路原理可知: 既得
寫(xiě)成矢量矩陣形式為:
1-4 兩輸入����,,兩輸出��,的系統(tǒng)�,其模擬結(jié)構(gòu)圖如圖1-30所示����,試求其狀態(tài)空間表達(dá)式和傳遞函數(shù)陣。
2���、
解:系統(tǒng)的狀態(tài)空間表達(dá)式如下所示:
1-5系統(tǒng)的動(dòng)態(tài)特性由下列微分方程描述
列寫(xiě)其相應(yīng)的狀態(tài)空間表達(dá)式���,并畫(huà)出相應(yīng)的模擬結(jié)構(gòu)圖���。
解:令,則有
相應(yīng)的模擬結(jié)構(gòu)圖如下:
1-6 (2)已知系統(tǒng)傳遞函數(shù),試求出系統(tǒng)的約旦標(biāo)準(zhǔn)型的實(shí)現(xiàn)�,并畫(huà)出相應(yīng)的模擬結(jié)構(gòu)圖
解:
1-7 給定下列狀態(tài)空間表達(dá)式
‘
(1) 畫(huà)出其模擬結(jié)構(gòu)圖
(2) 求系統(tǒng)的傳遞函數(shù)
解:
(2)
1-8 求下列矩陣的特征矢量
(3)
解:A的特征方程
解之得:
當(dāng)時(shí),
解得: 令 得
3��、
(或令�,得)
當(dāng)時(shí),
解得: 令 得
(或令�,得)
當(dāng)時(shí),
解得: 令 得
1-9將下列狀態(tài)空間表達(dá)式化成約旦標(biāo)準(zhǔn)型(并聯(lián)分解)
(2)
解:A的特征方程
當(dāng)時(shí)����,
解之得 令 得
當(dāng)時(shí),
解之得 令 得
當(dāng)時(shí)����,
解之得 令 得
約旦標(biāo)準(zhǔn)型
1-10 已知兩系統(tǒng)的傳遞函數(shù)分別為W1(s)和W2(s)
4、
試求兩子系統(tǒng)串聯(lián)聯(lián)結(jié)和并聯(lián)連接時(shí)�,系統(tǒng)的傳遞函數(shù)陣,并討論所得結(jié)果
解:(1)串聯(lián)聯(lián)結(jié)
(2)并聯(lián)聯(lián)結(jié)
1-11 (第3版教材)已知如圖1-22所示的系統(tǒng)�,其中子系統(tǒng)1、2的傳遞函數(shù)陣分別為
求系統(tǒng)的閉環(huán)傳遞函數(shù)
解:
1-11(第2版教材) 已知如圖1-22所示的系統(tǒng)���,其中子系統(tǒng)1��、2的傳遞函數(shù)陣分別為
求系統(tǒng)的閉環(huán)傳遞函數(shù)
解:
1-12 已知差分方程為
試將其用離散狀態(tài)空間表達(dá)式表示����,并使驅(qū)動(dòng)函數(shù)u的系數(shù)b(即控制列陣)為
(1)
解法1:
5、解法2:
求T,使得 得 所以
所以��,狀態(tài)空間表達(dá)式為
第二章習(xí)題答案
2-4 用三種方法計(jì)算以下矩陣指數(shù)函數(shù)��。
(2) A=
解:第一種方法: 令
則 ����,即。
求解得到���,
當(dāng)時(shí)�,特征矢量
由 ��,得
即�,可令
當(dāng)時(shí)�,特征矢量
由,得
即 ���,可令
則���,
第二種方法���,即拉氏反變換法:
第三種方法,即凱萊—哈密頓定理
由第一種方法可知�,
2-5 下列矩陣是否滿足狀態(tài)轉(zhuǎn)移矩陣的條件,如果滿
6��、足���,試求與之對(duì)應(yīng)的A陣���。
(3) (4)
解:(3)因?yàn)?,所以該矩陣滿足狀態(tài)轉(zhuǎn)移矩陣的條件
(4)因?yàn)?�,所以該矩陣滿足狀態(tài)轉(zhuǎn)移矩陣的條件
2-6 求下列狀態(tài)空間表達(dá)式的解:
初始狀態(tài)����,輸入時(shí)單位階躍函數(shù)。
解:
因?yàn)? ����,
2-9 有系統(tǒng)如圖2.2所示,試求離散化的狀態(tài)空間表達(dá)式。設(shè)采樣周期分別為T(mén)=0.1s和1s����,而和為分段常數(shù)。
圖2.2 系統(tǒng)結(jié)構(gòu)圖
解:將此圖化成模擬結(jié)構(gòu)圖
列出狀態(tài)方程
7���、
則離散時(shí)間狀態(tài)空間表達(dá)式為
由和得:
當(dāng)T=1時(shí)
當(dāng)T=0.1時(shí)
第三章習(xí)題
3-1判斷下列系統(tǒng)的狀態(tài)能控性和能觀測(cè)性�。系統(tǒng)中a,b,c,d的取值對(duì)能控性和能觀性是否有關(guān)����,若有關(guān),其取值條件如何���?
(1)系統(tǒng)如圖3.16所示:
解:由圖可得:
狀態(tài)空間表達(dá)式為:
由于���、、與無(wú)關(guān)���,因而狀態(tài)不能完全能控��,為不能控系統(tǒng)����。由于只與有關(guān)���,因而系統(tǒng)為
8�、不完全能觀的�,為不能觀系統(tǒng)。
(3)系統(tǒng)如下式:
解:如狀態(tài)方程與輸出方程所示����,A為約旦標(biāo)準(zhǔn)形。要使系統(tǒng)能控�,控制矩陣b中相對(duì)于約旦塊的最后一行元素不能為0,故有����。
要使系統(tǒng)能觀,則C中對(duì)應(yīng)于約旦塊的第一列元素不全為0�,故有。
3-2時(shí)不變系統(tǒng)
試用兩種方法判別其能控性和能觀性����。
解:方法一:
方法二:將系統(tǒng)化為約旦標(biāo)準(zhǔn)形。
�,
中有全為零的行,系統(tǒng)不可控���。中沒(méi)有全為0的列��,系統(tǒng)可觀���。
3-3確定使下列系統(tǒng)為狀態(tài)完全能控和狀態(tài)完全能觀的待定常數(shù)
解:構(gòu)造能控陣:
要使系統(tǒng)完全能控����,則���,即
構(gòu)造能觀陣:
要使系統(tǒng)
9����、完全能觀��,則�,即
3-4設(shè)系統(tǒng)的傳遞函數(shù)是
(1)當(dāng)a取何值時(shí),系統(tǒng)將是不完全能控或不完全能觀的��?
(2)當(dāng)a取上述值時(shí)��,求使系統(tǒng)的完全能控的狀態(tài)空間表達(dá)式�。
(3)當(dāng)a取上述值時(shí),求使系統(tǒng)的完全能觀的狀態(tài)空間表達(dá)式����。
解:(1) 方法1 :
系統(tǒng)能控且能觀的條件為W(s)沒(méi)有零極點(diǎn)對(duì)消����。因此當(dāng)a=1,或a=3或a=6時(shí)��,系統(tǒng)為不能控或不能觀��。
方法2:
系統(tǒng)能控且能觀的條件為矩陣C不存在全為0的列����。因此當(dāng)a=1,或a=3或a=6時(shí)���,系統(tǒng)為不能控或不能觀���。
(2)當(dāng)a=1, a=3或a=6時(shí),系統(tǒng)可化為能控標(biāo)準(zhǔn)I型
(3)根據(jù)對(duì)偶原理�,
10、當(dāng)a=1, a=2或a=4時(shí)����,系統(tǒng)的能觀標(biāo)準(zhǔn)II型為
3-6已知系統(tǒng)的微分方程為:
試寫(xiě)出其對(duì)偶系統(tǒng)的狀態(tài)空間表達(dá)式及其傳遞函數(shù)。
解:
系統(tǒng)的狀態(tài)空間表達(dá)式為
傳遞函數(shù)為
其對(duì)偶系統(tǒng)的狀態(tài)空間表達(dá)式為:
傳遞函數(shù)為
3-9已知系統(tǒng)的傳遞函數(shù)為
試求其能控標(biāo)準(zhǔn)型和能觀標(biāo)準(zhǔn)型���。
解:
系統(tǒng)的能控標(biāo)準(zhǔn)I型為
能觀標(biāo)準(zhǔn)II型為
3-10給定下列狀態(tài)空間方程��,試判別其是否變換為能控和能觀標(biāo)準(zhǔn)型�。
解:
3-11試將下列系統(tǒng)按能控性進(jìn)行分解
(1)
解:
rankM=2<3���,系統(tǒng)不是完全能控的��。
構(gòu)造奇異變換
11�、陣:,其中是任意的�,只要滿足滿秩。
即 得
3-12 試將下列系統(tǒng)按能觀性進(jìn)行結(jié)構(gòu)分解
(1)
解: 由已知得
則有
rank N=2<3�,該系統(tǒng)不能觀
構(gòu)造非奇異變換矩陣,有
則
3-13 試將下列系統(tǒng)按能控性和能觀性進(jìn)行結(jié)構(gòu)分解
(1)
解:由已知得
rank M=3���,則系統(tǒng)能控
rank N=3���,則系統(tǒng)能觀
所以此系統(tǒng)為能控并且能觀系統(tǒng)
取,則
則���,����,
3-14求下列傳遞函數(shù)陣的最小實(shí)現(xiàn)。
(1)
解: �,,
�,,
系統(tǒng)能控不能觀
取��,則
所以�,
���,
所以最小實(shí)現(xiàn)為
12��、��,���,,
驗(yàn)證:
3-15設(shè)和是兩個(gè)能控且能觀的系統(tǒng)
(1)試分析由和所組成的串聯(lián)系統(tǒng)的能控性和能觀性�,并寫(xiě)出其傳遞函數(shù);
(2)試分析由和所組成的并聯(lián)系統(tǒng)的能控性和能觀性���,并寫(xiě)出其傳遞函數(shù)���。
解:
(1)和串聯(lián)
當(dāng)?shù)妮敵鍪堑妮斎霑r(shí)��,
�,
則rank M=2<3�,所以系統(tǒng)不完全能控。
當(dāng)?shù)幂敵鍪堑妮斎霑r(shí)
����,
因?yàn)?
rank M=3 則系統(tǒng)能控
因?yàn)?
rank N=2<3 則系統(tǒng)不能觀
(2)和并聯(lián)
,
因?yàn)閞ank M=3����,所以系統(tǒng)完全能控
因?yàn)閞ank N=3,所以系統(tǒng)完全能觀
13�、
現(xiàn)代控制理論第四章習(xí)題答案
4-1判斷下列二次型函數(shù)的符號(hào)性質(zhì):
(1)
(2)
解:(1)由已知得
,�,
因此是負(fù)定的
(2)由已知得
,���,
因此不是正定的
4-2已知二階系統(tǒng)的狀態(tài)方程:
試確定系統(tǒng)在平衡狀態(tài)處大范圍漸進(jìn)穩(wěn)定的條件�。
解:方法(1):要使系統(tǒng)在平衡狀態(tài)處大范圍漸進(jìn)穩(wěn)定����,則要求滿足A的特征值均具有負(fù)實(shí)部。
即:
有解,且解具有負(fù)實(shí)部�。
即:
方法(2):系統(tǒng)的原點(diǎn)平衡狀態(tài)為大范圍漸近穩(wěn)定,等價(jià)于���。
取��,令����,則帶入���,得到
若 ����,則此方程組有唯一解��。即
其中
要求正定���,則要求
因此,且
4-3試用l
14��、yapunov第二法確定下列系統(tǒng)原點(diǎn)的穩(wěn)定性����。
(1)
(2)
解:(1)系統(tǒng)唯一的平衡狀態(tài)是����。選取Lyapunov函數(shù)為�,則
是負(fù)定的。����,有。即系統(tǒng)在原點(diǎn)處大范圍漸近穩(wěn)定���。
(2)系統(tǒng)唯一的平衡狀態(tài)是�。選取Lyapunov函數(shù)為���,則
是負(fù)定的���。,有���。即系統(tǒng)在原點(diǎn)處大范圍漸近穩(wěn)定����。
4-6設(shè)非線性系統(tǒng)狀態(tài)方程為:
試確定平衡狀態(tài)的穩(wěn)定性。
解:若采用克拉索夫斯基法����,則依題意有:
取
很明顯,的符號(hào)無(wú)法確定���,故改用李雅普諾夫第二法���。選取Lyapunov函數(shù)為,則
是負(fù)定的��。���,有�。即系統(tǒng)在原點(diǎn)處大范圍漸近穩(wěn)定���。
4-9設(shè)非線性方程:
試用
15、克拉索夫斯基法確定系統(tǒng)原點(diǎn)的穩(wěn)定性�。
解:(1)采用克拉索夫斯基法,依題意有:
����,有。
取
則 ,根據(jù)希爾維斯特判據(jù)���,有:
����,的符號(hào)無(wú)法判斷�。
(2)李雅普諾夫方法:選取Lyapunov函數(shù)為,則
是負(fù)定的���。��,有��。即系統(tǒng)在原點(diǎn)處大范圍漸近穩(wěn)定����。
4-12試用變量梯度法構(gòu)造下列系統(tǒng)的李雅普諾夫函數(shù)
解:假設(shè)的梯度為:
計(jì)算的導(dǎo)數(shù)為:
選擇參數(shù)����,試選,于是得:
����,顯然滿足旋度方程�,表明上述選擇的參數(shù)是允許的����。則有:
如果,則是負(fù)定的����,因此,是的約束條件����。
計(jì)算得到為:
是正定的,因此在范圍內(nèi)�,是漸進(jìn)穩(wěn)定的。
現(xiàn)代控
16����、制理論第五章習(xí)題答案
5-1已知系統(tǒng)狀態(tài)方程為:
試設(shè)計(jì)一狀態(tài)反饋陣使閉環(huán)系統(tǒng)極點(diǎn)配置為-1,-2�,-3。
解:依題意有:
���,系統(tǒng)能控。
系統(tǒng)的特征多項(xiàng)式為:
則將系統(tǒng)寫(xiě)成能控標(biāo)準(zhǔn)I型�,則有����。
引入狀態(tài)反饋后���,系統(tǒng)的狀態(tài)方程為:�,其中矩陣��,設(shè)�,則系統(tǒng)的特征多項(xiàng)式為:
根據(jù)給定的極點(diǎn)值,得到期望特征多項(xiàng)式為:
比較各對(duì)應(yīng)項(xiàng)系數(shù)����,可解得:則有:。
5-3有系統(tǒng):
(1) 畫(huà)出模擬結(jié)構(gòu)圖��。
(2) 若動(dòng)態(tài)性能不滿足要求�,可否任意配置極點(diǎn)?
(3) 若指定極點(diǎn)為-3��,-3��,求狀態(tài)反饋陣����。
解(1)系統(tǒng)模擬結(jié)構(gòu)圖如下:
(2)系統(tǒng)采用狀
17�、態(tài)反饋任意配置極點(diǎn)的充要條件是系統(tǒng)完全能控���。
對(duì)于系統(tǒng)有:
����,系統(tǒng)能控��,故若系統(tǒng)動(dòng)態(tài)性能不滿足要求����,可任意配置極點(diǎn)。
(3)系統(tǒng)的特征多項(xiàng)式為:
則將系統(tǒng)寫(xiě)成能控標(biāo)準(zhǔn)I型��,則有����。
引入狀態(tài)反饋后,系統(tǒng)的狀態(tài)方程為:�,設(shè),則系統(tǒng)的特征多項(xiàng)式為:
根據(jù)給定的極點(diǎn)值��,得到期望特征多項(xiàng)式為:
比較各對(duì)應(yīng)項(xiàng)系數(shù)���,可解得:���。
5-4設(shè)系統(tǒng)傳遞函數(shù)為
試問(wèn)能否利用狀態(tài)反饋將傳遞函數(shù)變成
若有可能,試求出狀態(tài)反饋�,并畫(huà)出系統(tǒng)結(jié)構(gòu)圖。
解:
由于傳遞函數(shù)無(wú)零極點(diǎn)對(duì)消����,因此系統(tǒng)為能控且能觀。
能控標(biāo)準(zhǔn)I型為
令為狀態(tài)反饋陣�,則閉環(huán)系統(tǒng)的特征多
18、項(xiàng)式為
由于狀態(tài)反饋不改變系統(tǒng)的零點(diǎn)�,根據(jù)題意,配置極點(diǎn)應(yīng)為-2����,-2,-3��,得期望特征多項(xiàng)式為
比較與的對(duì)應(yīng)項(xiàng)系數(shù)���,可得
即
系統(tǒng)結(jié)構(gòu)圖如下:
5-5使判斷下列系統(tǒng)通過(guò)狀態(tài)反饋能否鎮(zhèn)定�。
(1)
解:系統(tǒng)的能控陣為:
��,系統(tǒng)能控��。
由定理5.2.1可知,采用狀態(tài)反饋對(duì)系統(tǒng)任意配置極點(diǎn)的充要條件是完全能控���。又由于����,系統(tǒng)能控�,可以采用狀態(tài)反饋將系統(tǒng)的極點(diǎn)配置在根平面的左側(cè),使閉環(huán)系統(tǒng)鎮(zhèn)定��。
5-7設(shè)計(jì)一個(gè)前饋補(bǔ)償器��,使系統(tǒng)
解耦����,且解耦后的極點(diǎn)為。
解:
5-10已知系統(tǒng):
試設(shè)計(jì)一個(gè)狀態(tài)觀測(cè)器�,使觀測(cè)器的極點(diǎn)為-r,-2r(r>0)��。
解:因?yàn)闈M秩��,系統(tǒng)能觀����,可構(gòu)造觀測(cè)器�。
系統(tǒng)特征多項(xiàng)式為��,所以有
于是
引入反饋陣��,使得觀測(cè)器特征多項(xiàng)式:
根據(jù)期望極點(diǎn)得期望特征式:
比較與各項(xiàng)系數(shù)得:
即�,反變換到x狀態(tài)下
觀測(cè)器方程為:
34
 《現(xiàn)代控制理論》第3版課后習(xí)題答案-
《現(xiàn)代控制理論》第3版課后習(xí)題答案-