《ADAMS 基礎(chǔ)知識(shí)講解》由會(huì)員分享���,可在線閱讀�����,更多相關(guān)《ADAMS 基礎(chǔ)知識(shí)講解(4頁(yè)珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索���。
1、1�����、單位
開始時(shí)需要為模型設(shè)置單位��。在所有的預(yù)置單位系統(tǒng)中����,時(shí)間單位為秒,角度為度���?���?稍O(shè)置:
MMKS--長(zhǎng)度千米��,質(zhì)量為千克,力為牛頓���。
MKS—長(zhǎng)度為米��,質(zhì)量為千克����,力為牛頓���。
CGS—長(zhǎng)度為厘米�,質(zhì)量為克���,力為達(dá)因�。
IPS—長(zhǎng)度為英寸����,質(zhì)量為斯勒格(slug),力為磅�。
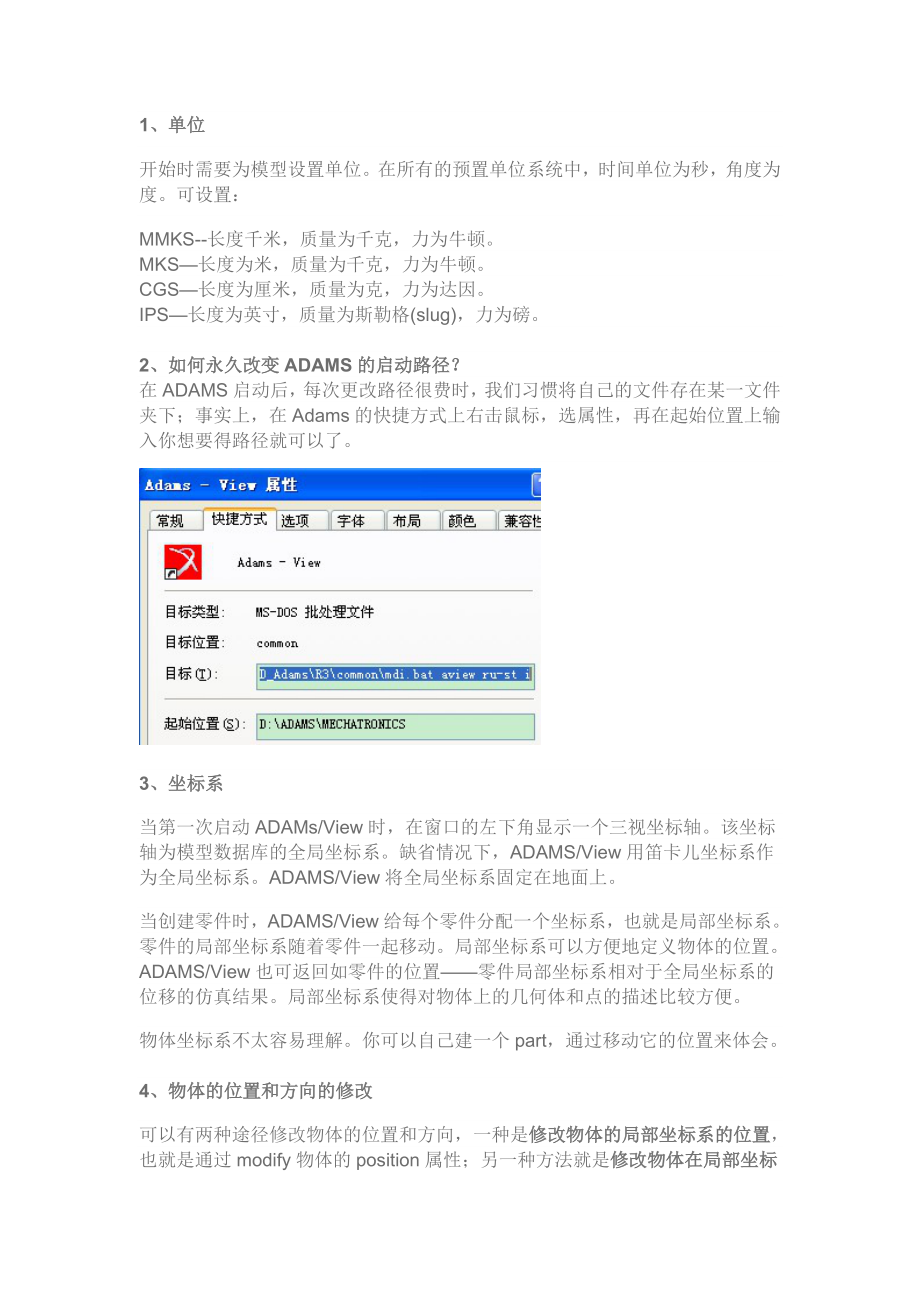
2、如何永久改變ADAMS的啟動(dòng)路徑���?
在ADAMS啟動(dòng)后�����,每次更改路徑很費(fèi)時(shí)����,我們習(xí)慣將自己的文件存在某一文件夾下;事實(shí)上�����,在Adams的快捷方式上右擊鼠標(biāo)�,選屬性��,再在起始位置上輸入你想要得路徑就可以了��。
3�����、坐標(biāo)系
當(dāng)?shù)谝淮螁?dòng)ADAMs/View時(shí)��,在窗口的左下角顯示一個(gè)三視坐標(biāo)軸���。該
2��、坐標(biāo)軸為模型數(shù)據(jù)庫(kù)的全局坐標(biāo)系��。缺省情況下�,ADAMS/View用笛卡兒坐標(biāo)系作為全局坐標(biāo)系。ADAMS/View將全局坐標(biāo)系固定在地面上����。
當(dāng)創(chuàng)建零件時(shí),ADAMS/View給每個(gè)零件分配一個(gè)坐標(biāo)系���,也就是局部坐標(biāo)系���。零件的局部坐標(biāo)系隨著零件一起移動(dòng)。局部坐標(biāo)系可以方便地定義物體的位置���。ADAMS/View也可返回如零件的位置——零件局部坐標(biāo)系相對(duì)于全局坐標(biāo)系的位移的仿真結(jié)果����。局部坐標(biāo)系使得對(duì)物體上的幾何體和點(diǎn)的描述比較方便�。
物體坐標(biāo)系不太容易理解。你可以自己建一個(gè)part���,通過(guò)移動(dòng)它的位置來(lái)體會(huì)�����。
4��、物體的位置和方向的修改
可以有兩種途徑修改物體的位置和方向���,一種是修改物體
3�、的局部坐標(biāo)系的位置��,也就是通過(guò)modify物體的position屬性��;另一種方法就是修改物體在局部坐標(biāo)系中的位置����,可以通過(guò)修改控制物體的關(guān)鍵點(diǎn)來(lái)實(shí)現(xiàn)����。我感覺(jué)這兩種方法的結(jié)果是不同的,但是對(duì)于仿真過(guò)程來(lái)說(shuō)�����,物體的位置就是質(zhì)心的位置�,所以對(duì)于仿真是一樣的�。
5����、方向的描述
對(duì)于初學(xué)的人來(lái)說(shuō),方向的描述不太容易理解�����。之前我們都是用方向余弦之類的量來(lái)描述方向的��。在ADAMS中��,為了求解方程時(shí)計(jì)算的方便���,使用歐拉角來(lái)描述方向�。就是用繞坐標(biāo)軸轉(zhuǎn)過(guò)的角度來(lái)定義����。旋轉(zhuǎn)的旋轉(zhuǎn)軸可以自己定義,默認(rèn)使用313��,也就是先繞Z軸�����,再繞X軸,再繞Z軸��。
6、Marker點(diǎn)與Pointer點(diǎn)的區(qū)別
Mark
4、er:具有方向性�����,大部分情況都是伴隨物件自動(dòng)產(chǎn)生的,而Point不具有方向性�����,都是用戶自己建立的���;Marker點(diǎn)可以用來(lái)定義構(gòu)件的幾何形狀和方向���,定義約束與運(yùn)動(dòng)的方向等���,而Point點(diǎn)常用來(lái)作為參數(shù)化的參考點(diǎn)���,若構(gòu)件與參考點(diǎn)相連,當(dāng)修改參考點(diǎn)的位置時(shí)���,其所關(guān)聯(lián)的物體也會(huì)一起移動(dòng)或改變���。
7���、約束
約束是用來(lái)連接兩個(gè)部件使他們之間具有一定的相對(duì)運(yùn)動(dòng)關(guān)系。通過(guò)約束���,使模型中各個(gè)獨(dú)立的部件聯(lián)系起來(lái)形成有機(jī)的整體���。
在ADAMS/View中,有各種各樣的約束���,大體上將其分為四類:
基本約束:
點(diǎn)重合約束(ATPOINT)���、共線約束(INLINE)、共面約束(INPLANE)���、方向定位
5���、約束(ORIENTATION)、軸平行約束(PARALLEL_AXES)、軸垂直約束(PERPENDICULAR)等���。
常用鉸約束:
球鉸(SPHERICAL)���、虎克鉸(HOOKE)、廣義鉸(UNIVERSIAL)���、常速度鉸(CONVEL)���、固定鉸(FIXED)、平移副(TRANSLATIONAL)���、圓柱副(CYLINDER)���、旋轉(zhuǎn)副(REVOLUTE)、螺旋副(SCREW)���、齒輪副等���。
高副約束:
曲線-曲線約束(CVCV)���、點(diǎn)-曲線約束(PTCV)���。
驅(qū)動(dòng):
按驅(qū)動(dòng)加在對(duì)象類型上分點(diǎn)驅(qū)動(dòng)和鉸驅(qū)動(dòng)���;按驅(qū)動(dòng)特點(diǎn)來(lái)分有平移驅(qū)動(dòng)和旋轉(zhuǎn)驅(qū)動(dòng)。
8���、驅(qū)動(dòng)和力的區(qū)別
驅(qū)動(dòng)
6���、和力都會(huì)引起物體的運(yùn)動(dòng),但兩者是有本質(zhì)上的區(qū)別的���。
驅(qū)動(dòng)產(chǎn)生確定的運(yùn)動(dòng)���,可以消除物體的自由度。
力產(chǎn)生的運(yùn)動(dòng)是不確定的���,不能消除物體的自由度���。
9、運(yùn)動(dòng)學(xué)仿真后���,如何測(cè)量驅(qū)動(dòng)力矩或其他的物理量���?
我們?cè)谧鰴C(jī)器人運(yùn)動(dòng)規(guī)劃時(shí)���,往往根據(jù)規(guī)劃給出各個(gè)關(guān)節(jié)的運(yùn)動(dòng)軌跡,進(jìn)行運(yùn)動(dòng)學(xué)分析���,如果要查看實(shí)現(xiàn)該運(yùn)動(dòng)各個(gè)關(guān)節(jié)需要加的驅(qū)動(dòng)力矩���,可以右鍵單擊相應(yīng)的motion,然后在下拉菜單選擇measure���,在出現(xiàn)的界面里面選擇Torque���,點(diǎn)ok就出來(lái)力矩曲線了,其他物理量類同���。
10���、ADAMS/VIEW中輸入函數(shù)的指定方法
輸入函數(shù)是指從輸入狀態(tài)變量取值的時(shí)間函數(shù)。只需在所建立的模型中在需要進(jìn)
7���、行控制的部件上施加一定的力或力矩���,然后對(duì)其進(jìn)行函數(shù)化:其函數(shù)的自變量為所指定的輸入狀態(tài)變量。這樣所建立的模型就是受輸入控制的系統(tǒng)���。
11���、如何將回放過(guò)程保存為AVI格式的電影文件
點(diǎn)擊plotting(或F8)進(jìn)入postprocessor ,右鍵--load ANIMATION���,點(diǎn)擊"record"開始錄制���。點(diǎn)擊"play"開始。
12���、ADAMS中的文件類型介紹
模型及分析主要有以下幾種類型文件:
ADAMS/View二進(jìn)制數(shù)據(jù)庫(kù)bin文件
ADAMS/View命令cmd文件
ADAMS/Solver模型語(yǔ)言adm文件
ADAMS/Solver仿真控制語(yǔ)言acf文件
8���、,以及
ADAMS/Solver仿真分析結(jié)果文件:req文件���、res文件���、gra文件 ���、out文件、msg文件���。
ADAMS/View二進(jìn)制數(shù)據(jù)庫(kù)bin文件以“ .bin”為文件名后綴���,文件中記錄了從ADAMS啟動(dòng)后到存儲(chǔ)為bin文件時(shí)的全部信息-包含模型的完整拓?fù)浣Y(jié)構(gòu)信息、模型仿真信息以及后處理信息���?��?梢园鄠€(gè)模型、多個(gè)分析工況和結(jié)果���?��?梢员4鍭DAMS/View的各種設(shè)置信息。文件為二進(jìn)制不能閱讀���、編輯���,只能通過(guò)ADAMS/View調(diào)閱���,由于信息全面一般文件都比較大���。
ADAMS/View命令cmd文件以“ .cmd”為文件名后綴���,是由ADAMS/View命令編寫的模型文件
9、���,可以包含模型的完整拓?fù)浣Y(jié)構(gòu)信息(包括所有幾何信息)���、模型仿真信息,為文本文件���,可讀性強(qiáng)���,可以進(jìn)行編程,是ADAMS的二次開發(fā)語(yǔ)言���,不包含ADAMS/View的環(huán)境設(shè)置信息���,不包含仿真結(jié)果信息���,只能包含單個(gè)模型。
ADAMS/Solver模型語(yǔ)言(ADAMS Data Language)adm文件���,以“ .adm”為文件名后綴���,文件中包含模型中拓?fù)浣Y(jié)構(gòu)信息,但有些幾何形體如 link等不能保留���。ADAMS/View的環(huán)境設(shè)置不能保留���。ADAMS/Solver可以讀取adm文件,與ADAMS/Solver仿真控制語(yǔ)言acf文件配合可以直接利用ADAMS/Solver進(jìn)行求解���。
ADA
10���、MS/Solver仿真控制語(yǔ)言acf文件,以“ .acf”為文件名后綴���,文件中可以包含ADAMS/Solver命令對(duì)模型進(jìn)行修改和控制的命令���,從而控制仿真的進(jìn)行���。
ADAMS/Solver將仿真分析結(jié)果中用戶定義的輸出變量輸出到req文件,以“ .req”為文件名后綴���;ADAMS/Solver將仿真分析結(jié)果中將模型的缺省輸出變量輸出到res文件���,以“ .res”為文件名后綴���;ADAMS/Solver將仿真分析結(jié)果中圖形部分結(jié)果輸出到gra文件���,以“ .gra”為文件名后綴。ADAMS/Solver將仿真分析結(jié)果中用戶定義的輸出變量以列表的形式輸出到out文件���,以“ .out”為文件名后綴���。ADAMS/Solver將仿真過(guò)程中的警告信息、錯(cuò)誤信息輸出到msg文件���,以“.msg”為文件后綴���。
13���、如何使用two body two location?
比如四桿機(jī)構(gòu)���,桿長(zhǎng)已知���,一個(gè)為機(jī)架,一個(gè)為曲柄���,一個(gè)為搖桿���,一個(gè)為連桿。四個(gè)轉(zhuǎn)動(dòng)關(guān)節(jié)的位置如何確定���?
——可以試著以two body two location去做約束���,再?gòu)膕imulation下找simulation control便可以做組合模擬。
 ADAMS 基礎(chǔ)知識(shí)講解
ADAMS 基礎(chǔ)知識(shí)講解