《(全國通用)2020版高考物理一輪復習 第十章 微專題75 電磁感應中的能量轉(zhuǎn)化問題加練半小時(含解析)》由會員分享���,可在線閱讀�����,更多相關《(全國通用)2020版高考物理一輪復習 第十章 微專題75 電磁感應中的能量轉(zhuǎn)化問題加練半小時(含解析)(8頁珍藏版)》請在裝配圖網(wǎng)上搜索。
1�����、電磁感應中的能量轉(zhuǎn)化問題
[方法點撥] 克服安培力做功的過程就是其他形式的能轉(zhuǎn)化為電能的過程����,克服安培力做了多少功,就有多少其他形式的能轉(zhuǎn)化為電能.
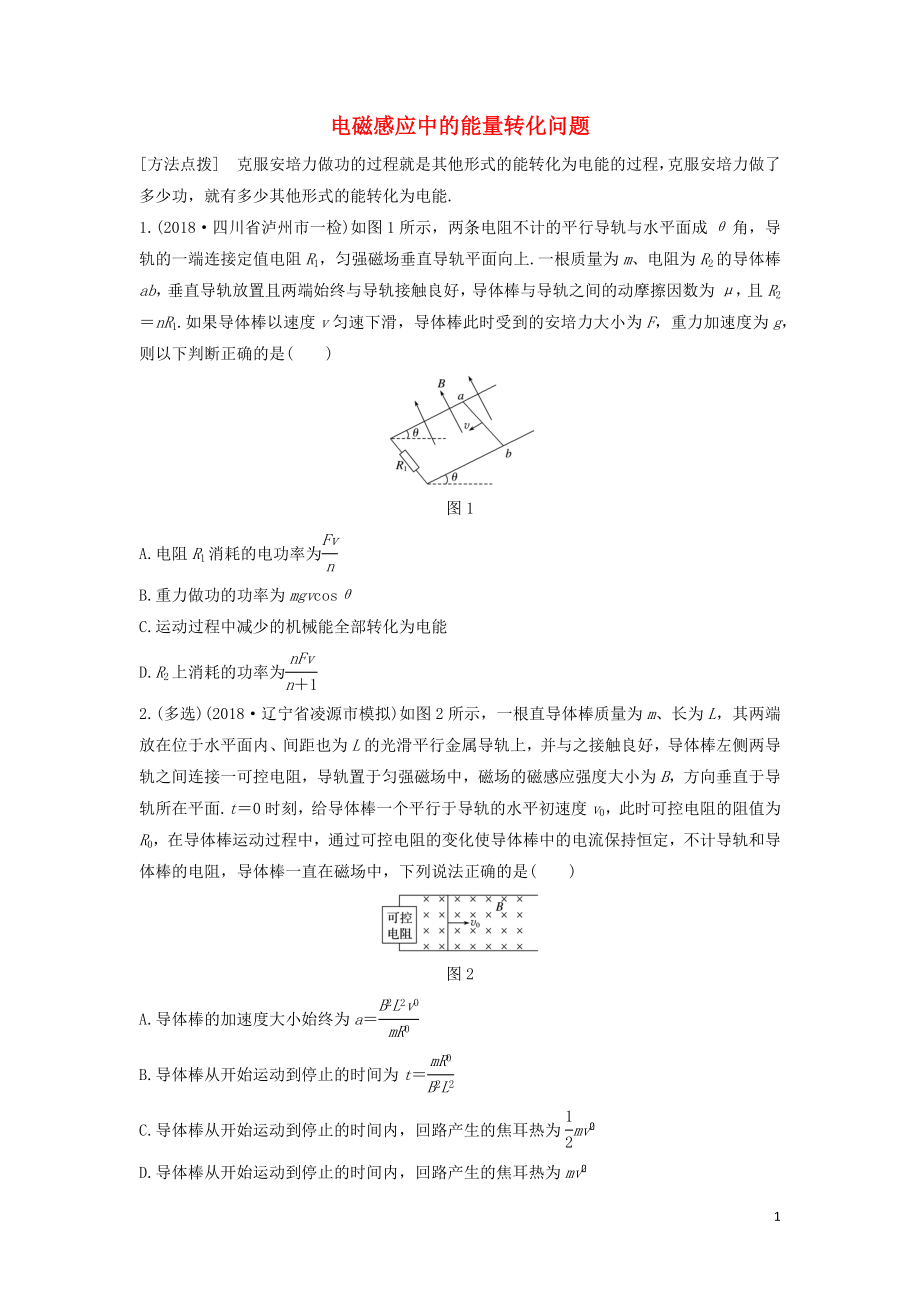
1.(2018·四川省瀘州市一檢)如圖1所示�,兩條電阻不計的平行導軌與水平面成θ角,導軌的一端連接定值電阻R1���,勻強磁場垂直導軌平面向上.一根質(zhì)量為m����、電阻為R2的導體棒ab,垂直導軌放置且兩端始終與導軌接觸良好����,導體棒與導軌之間的動摩擦因數(shù)為μ,且R2=nR1.如果導體棒以速度v勻速下滑���,導體棒此時受到的安培力大小為F���,重力加速度為g,則以下判斷正確的是( )
圖1
A.電阻R1消耗的電功率為
B.重力做功的功率為mgvcosθ
2����、
C.運動過程中減少的機械能全部轉(zhuǎn)化為電能
D.R2上消耗的功率為
2.(多選)(2018·遼寧省凌源市模擬)如圖2所示,一根直導體棒質(zhì)量為m����、長為L,其兩端放在位于水平面內(nèi)�����、間距也為L的光滑平行金屬導軌上,并與之接觸良好���,導體棒左側(cè)兩導軌之間連接一可控電阻�,導軌置于勻強磁場中���,磁場的磁感應強度大小為B����,方向垂直于導軌所在平面.t=0時刻���,給導體棒一個平行于導軌的水平初速度v0����,此時可控電阻的阻值為R0�,在導體棒運動過程中�����,通過可控電阻的變化使導體棒中的電流保持恒定�,不計導軌和導體棒的電阻,導體棒一直在磁場中,下列說法正確的是( )
圖2
A.導體棒的加速度大小始終為a=
B
3�、.導體棒從開始運動到停止的時間為t=
C.導體棒從開始運動到停止的時間內(nèi),回路產(chǎn)生的焦耳熱為mv
D.導體棒從開始運動到停止的時間內(nèi)���,回路產(chǎn)生的焦耳熱為mv
3.(多選)(2018·廣東省東莞市模擬)如圖3所示�����,在勻強磁場的上方有一質(zhì)量為m���、半徑為R的細導線做成的圓環(huán),圓環(huán)的圓心與勻強磁場的上邊界的距離為h.將圓環(huán)由靜止釋放���,圓環(huán)剛進入磁場的瞬間和完全進入磁場的瞬間�����,速度均為v.已知勻強磁場的磁感應強度為B����,導體圓環(huán)的電阻為r�����,重力加速度為g,則下列說法正確的是( )
圖3
A.圓環(huán)剛進入磁場的瞬間�����,速度v=
B.圓環(huán)進入磁場的過程中���,電阻產(chǎn)生的熱量為2mgR
C.圓環(huán)進入
4����、磁場的過程中�����,通過導體橫截面的電荷量為
D.圓環(huán)進入磁場的過程做的是勻速直線運動
4.(多選)如圖4所示���,間距為L的兩根平行金屬導軌彎成“L”形����,豎直導軌面與水平導軌面均足夠長����,整個裝置處于豎直向上大小為B的勻強磁場中.質(zhì)量均為m����、阻值均為R的導體棒ab�、cd均垂直于導軌放置�����,兩導體棒與導軌間動摩擦因數(shù)均為μ����,當導體棒cd在水平恒力作用下以速度v0沿水平導軌向右勻速運動時,釋放導體棒ab����,它在豎直導軌上勻加速下滑.某時刻將導體棒cd所受水平恒力撤去,經(jīng)過一段時間���,導體棒cd靜止����,此過程流經(jīng)導體棒cd的電荷量為q(導體棒ab����、cd與導軌間接觸良好且接觸點及金屬導軌的電阻不計,已知重力加速度為
5�、g)�����,則( )
圖4
A.導體棒cd受水平恒力作用時流經(jīng)它的電流I=
B.導體棒ab勻加速下滑時的加速度大小a=g-
C.導體棒cd在水平恒力撤去后它的位移為s=
D.導體棒cd在水平恒力撤去后它產(chǎn)生的焦耳熱為Q=mv02-
5.如圖5所示�����,MN和PQ是電阻不計的平行金屬導軌����,其間距為L�����,導軌彎曲部分光滑�����,平直部分粗糙����,N、Q兩點間接一個阻值為R的電阻.平直部分導軌左邊區(qū)域有寬度為d�����、方向豎直向上�、磁感應強度大小為B的勻強磁場.質(zhì)量為m、電阻也為R的金屬棒從高度為h處由靜止釋放���,到達磁場右邊界處恰好停止.已知金屬棒與平直部分導軌間的動摩擦因數(shù)為μ�,金屬棒與導軌間接觸良好���,重力
6�、加速度為g�����,則金屬棒穿過磁場區(qū)域的過程中( )
圖5
A.金屬棒兩端的最大電壓為BL
B.金屬棒在磁場中的運動時間為
C.克服安培力所做的功為mgh
D.右端的電阻R產(chǎn)生的焦耳熱為(mgh+μmgd)
6.(多選)如圖6所示���,固定在水平面上的光滑平行金屬導軌�,間距為L���,右端接有阻值為R的電阻����,空間存在方向豎直向上�����、磁感應強度為B的勻強磁場.質(zhì)量為m、電阻為r的導體棒ab與固定彈簧相連�����,放在導軌上.初始時刻����,彈簧恰處于自然長度.給導體棒水平向右的初速度v0,導體棒開始沿導軌往復運動����,在此過程中,導體棒始終與導軌垂直并保持良好接觸.已知導體棒的電阻r與定值電阻R的阻值相等�,不計導
7、軌電阻�����,則下列說法中正確的是( )
圖6
A.導體棒開始運動的初始時刻受到的安培力向左
B.導體棒開始運動的初始時刻導體棒兩端的電壓U=BLv0
C.導體棒開始運動后速度第一次為零時���,系統(tǒng)的彈性勢能Ep=mv02
D.金屬棒最終會停在初始位置�����,在金屬棒整個運動過程中����,電阻R上產(chǎn)生的焦耳熱為mv02
7.(2018·湖北省荊荊襄宜四地七校聯(lián)考)如圖7所示�����,相距L=0.5m的平行金屬導軌MNS���、PQT處在磁感應強度B=0.4T的勻強磁場中���,水平導軌處的磁場方向豎直向上,光滑傾斜導軌處的磁場方向垂直于導軌平面斜向下.質(zhì)量均為m=40g�����、電阻均為R=0.1Ω的導體棒ab�����、cd均垂直放
8�、置于導軌上并與導軌接觸良好,導軌電阻不計.質(zhì)量M=200g的物體C�,用絕緣細線繞過光滑的定滑輪分別與導體棒ab�、cd相連接.細線沿導軌中心線且在導軌平面內(nèi)����,細線及滑輪質(zhì)量不計.已知傾斜導軌與水平面的夾角θ=37°,水平導軌與導體棒ab間的動摩擦因數(shù)μ=0.4.重力加速度g取10m/s2�,水平導軌足夠長,導體棒cd運動中始終不離開傾斜導軌.物體C由靜止釋放�����,當它達到最大速度時下落的高度h=1m�����,試求這一運動過程中:(sin37°=0.6����,cos37°=0.8)
圖7
(1)物體C能達到的最大速度vm;
(2)系統(tǒng)產(chǎn)生的內(nèi)能�;
(3)連接cd棒的細線對cd棒做的功.
答案精析
9、1.D [導體棒以速度v勻速下滑時�����,由E=BLv,I=�,F(xiàn)=BIL得安培力F=①
電阻R1消耗的電功率為P=I2R1=()2R1②
又R2=nR1③
聯(lián)立①②③解得,P=���,
故A錯誤�;
重力做功的功率為mgvsinθ�����,B錯誤����;
導體棒克服安培力和摩擦力做功���,減少的機械能轉(zhuǎn)化為電能和內(nèi)能�,C錯誤���;
R2和R1串聯(lián)���,電流相等,根據(jù)P=I2R可知�,R2消耗的功率等于R1消耗的功率的n倍,為,D正確.]
2.ABC [由右手定則和左手定則可得����,導體棒受到安培力水平向左,導體棒向右做減速運動�,在導體棒運動過程中,通過可控電阻的變化使導體棒的電流I保持恒定�����,對導體棒由牛頓第二定律可得BIL
10���、=ma�,導體棒向右做勻減速運動����,結合E=BLv,I=可得�,==ma,可知導體棒的加速度大小始終為a=�����,故A正確���;由導體棒做勻減速運動可得v=v0-at���,導體棒從開始運動到停止的時間t=���,故B正確;根據(jù)能量守恒定律可知���,導體棒從開始運動到停止運動的過程中���,回路產(chǎn)生的焦耳熱為Q=mv02,故C正確�����,D錯誤.]
3.ABC [圓環(huán)從題圖所示位置開始運動到剛進入磁場時���,下落的高度為h-R,根據(jù)自由落體運動的規(guī)律得到v2=2g(h-R)�,解得v=,故選項A正確�����;
圓環(huán)剛進入磁場的瞬間和完全進入磁場的瞬間,速度相等�����,根據(jù)功能關系可以知道重力做的功等于圓環(huán)電阻產(chǎn)生的熱量�����,大小為2mgR����,故選項B正確;
11���、
圓環(huán)進入磁場的過程中����,通過導體某個橫截面的電荷量為q=·Δt=·Δt==�����,故選項C正確���;
圓環(huán)進入磁場的過程中�,受到的安培力F=,隨有效長度L發(fā)生改變���,圓環(huán)受力不能平衡�,因此圓環(huán)不可能做勻速直線運動���,故選項D錯誤.]
4.BCD [cd棒切割磁感線產(chǎn)生感應電動勢為E=BLv0�����,根據(jù)閉合電路歐姆定律得I==�����,故A錯誤���;對于ab棒,根據(jù)牛頓第二定律得mg-Ff=ma�,又Ff=μFN�,F(xiàn)N=BIL,聯(lián)立解得a=g-�,故B正確;對于cd棒����,電荷量q==���,則得s=,故C正確�����;cd棒減速運動過程中���,由動能定理得-μmgs-WFA=0-mv02�����,電路中產(chǎn)生的焦耳熱Q=WFA����,則可得Q=mv02-����,ab
12、棒與cd棒串聯(lián)且電阻相同����,故cd棒產(chǎn)生的焦耳熱Q2=Q=mv02-�,D正確.]
5.A [金屬棒剛進入磁場時的速度最大�,此時金屬棒產(chǎn)生的電動勢最大,mgh=mv2�,解得v=,電動勢E=BLv=BL����,金屬棒兩端的電壓為路端電壓,U==���,A正確���;金屬棒在磁場中做加速度減小的減速運動,不是勻減速運動�,無法求其運動時間,B錯誤���;對金屬棒運動全過程應用動能定理得���,mgh-W克安-μmg·d=0,所以克服安培力做功小于mgh�,C錯誤�;由上式解得Q=W克安=mgh-μmgd����,右端電阻R產(chǎn)生的焦耳熱QR=(mgh-μmgd)����,D錯誤.]
6AD [導體棒和定值電阻組成閉合回路,開始運動的初始時刻�,導體棒向
13、右運動����,回路面積減小,根據(jù)楞次定律可判斷棒中電流方向為由a到b����,所以安培力水平向左,選項A正確�����;導體棒切割磁感線產(chǎn)生的感應電動勢E=BLv0�,但導體棒和定值電阻組成閉合回路,導體棒兩端電壓為路端電壓�,已知導體棒的電阻r與定值電阻R的阻值相等,所以路端電壓U=E=BLv0,選項B錯誤����;導體棒向右運動的過程,安培力和彈簧彈力做功����,產(chǎn)生的焦耳熱為Q,根據(jù)功能關系有Q+Ep=mv02����,選項C錯誤;導體棒最終停下來時���,不再切割磁感線����,沒有感應電動勢和感應電流���,不受安培力�����,因?qū)к壒饣?,沒有摩擦力,所以導體棒靜止時�����,彈簧彈力為0�,即彈簧恢復原長���,根據(jù)功能關系���,電路中產(chǎn)生的焦耳熱為Q=mv02����,由于r=R,所
14�����、以電阻R上產(chǎn)生的焦耳熱為Q=mv02���,選項D正確.]
7.(1)2m/s (2)1.2J (3)0.84J
解析 (1)由法拉第電磁感應定律得�,回路的感應電動勢為E=2BLvm�����,由閉合電路歐姆定律得�,回路中的電流為I=,導體棒ab����、cd受到的安培力為F=BLI,設連接導體棒ab與cd的細線中的張力大小為FT1�,連接導體棒ab與物體C的細線中的張力大小為FT2,導體棒ab�、cd及物體C的受力如圖所示,由平衡條件得FT1=mgsin37°+F���,F(xiàn)T2=FT1+F+Ff�,F(xiàn)T2=Mg�,聯(lián)立解得vm=2m/s.
(2)設系統(tǒng)在該過程中產(chǎn)生的內(nèi)能為E1,由能量守恒定律得Mgh=(2m+M)v2+mghsin37°+E1�����,聯(lián)立解得E1=1.2J.
(3)ab棒運動過程中由于摩擦產(chǎn)生的內(nèi)能E2=μmgh=0.16J�,這一過程電流產(chǎn)生的內(nèi)能E3=E1-E2=1.04J����,又因為ab棒、cd棒的電阻相等�,故電流通過cd棒產(chǎn)生的內(nèi)能E4=0.52J���,對導體棒cd���,設這一過程中細線對其做的功為W,則由能量守恒定律得W=mghsin37°+mv2+E4����,聯(lián)立解得W=0.84J.
8
 (全國通用)2020版高考物理一輪復習 第十章 微專題75 電磁感應中的能量轉(zhuǎn)化問題加練半小時(含解析)
(全國通用)2020版高考物理一輪復習 第十章 微專題75 電磁感應中的能量轉(zhuǎn)化問題加練半小時(含解析)