《基于51單片機(jī)的智能循跡小車的設(shè)計(jì)-基于51單片機(jī)的智能循跡小車的設(shè)計(jì)(共6頁)》由會(huì)員分享��,可在線閱讀�����,更多相關(guān)《基于51單片機(jī)的智能循跡小車的設(shè)計(jì)-基于51單片機(jī)的智能循跡小車的設(shè)計(jì)(共6頁)(6頁珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索���。
1����、精選優(yōu)質(zhì)文檔-----傾情為你奉上
· 54· 儀 表 技術(shù) 2011年第 2期
基于 51單片機(jī)的智能循跡小車的設(shè)計(jì)
黃春平 ,萬其明 ,葉 林(中山職業(yè)技術(shù)學(xué)院電子信息工程系 ,廣東 中山 )
摘要:利用 STC89S52為控制核心, 通過紅外發(fā)射和接收管采集信號(hào), 并將信號(hào)轉(zhuǎn)換為能被單片機(jī)識(shí)別的數(shù)字信號(hào)�����。 單片機(jī)控制直流電機(jī)不同的轉(zhuǎn)動(dòng)狀態(tài), 實(shí)現(xiàn)小車的前進(jìn)����、后退、左轉(zhuǎn)、右轉(zhuǎn)等功能, 并通過發(fā)光二極管指示不同的運(yùn)動(dòng)狀態(tài)���。 整個(gè)系統(tǒng)的電路
結(jié)構(gòu)簡(jiǎn)單, 可靠性高���。
關(guān)鍵詞:51單片機(jī);紅外發(fā)射;直流電機(jī) ;智能小車
中圖分類號(hào):TP273 文獻(xiàn)
2、標(biāo)識(shí)碼:A 文章編號(hào):1006 -2394(2011)02 -0054 -03
TheDesignofInteligentCarBasedon51
HUANGChun-ping, WANQi-ming, YELin
(ZhongshanPolytechnic, Zhongshan, China)
Abstract:ThechipSTC89S52 isusedasthecontrolcenter, andsignalsarecolectedthroughtheinfraredtransmit-terandreceiver.Signalsareconvertedtodigi
3�����、talsignalswhichcanbeidentifiedbythesinglechip.Themicroprocessor controlsDCmotorrotationstatetoachievefunctionsofcargoingforward, backward, turningleftandturningright.Dif-ferentmotionstatesareindicatedthroughtheLED.Thesystemhassimplecircuitstructureandhighreliability.
Keywords:51-microcontroler;in
4���、fraredtransmiting;DCmotor;inteligentcar
專心---專注---專業(yè)
0 引言
智能小車在感知效應(yīng)方面全面模擬人的機(jī)器系統(tǒng) ,它是人工智能技術(shù)的試驗(yàn)場(chǎng)�。智能小車具有識(shí)別�、推理、學(xué)習(xí)和規(guī)劃等智能機(jī)制, 可以把感知和智能化結(jié)合起來 ,能在非特定環(huán)境下工作 , 在惡劣條件下探測(cè)�����、救生等方面具有廣闊的應(yīng)用前景�?���;?STC89S52單片機(jī)的智能循跡小車能沿黑色指引導(dǎo)線前進(jìn),通過紅外發(fā)射接收,自動(dòng)識(shí)別處理,發(fā)出聲光信號(hào)指示運(yùn)動(dòng)狀態(tài)。
1 循跡小車硬件組成
循跡小車由機(jī)械和電控系統(tǒng)兩部分組成。機(jī)械載體采用一種簡(jiǎn)單的車模裝置,采用左右兩輪
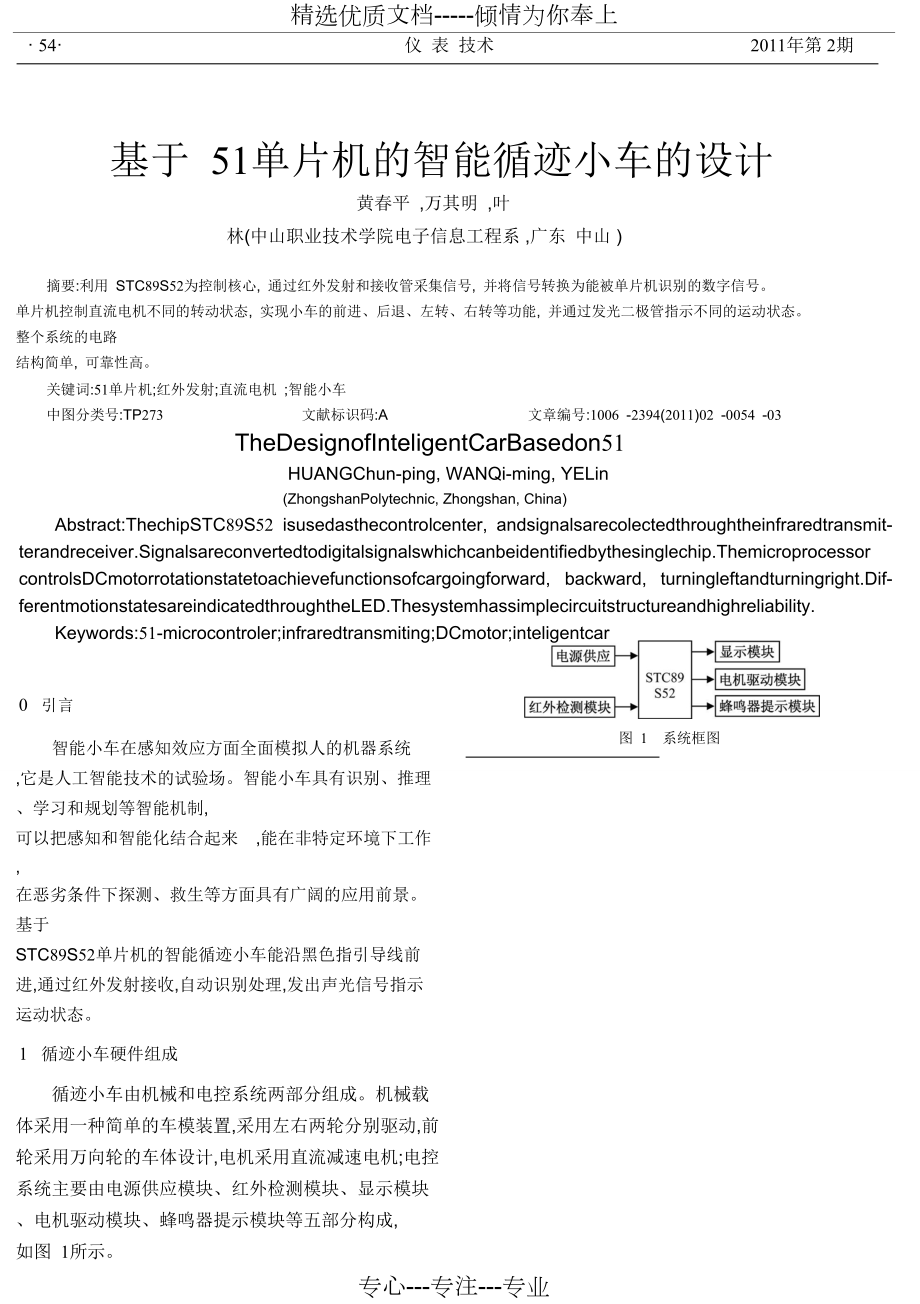
5���、分別驅(qū)動(dòng),前輪采用萬向輪的車體設(shè)計(jì),電機(jī)采用直流減速電機(jī);電控系統(tǒng)主要由電源供應(yīng)模塊��、紅外檢測(cè)模塊�����、顯示模塊���、電機(jī)驅(qū)動(dòng)模塊、蜂鳴器提示模塊等五部分構(gòu)成, 如圖 1所示����。
圖 1 系統(tǒng)框圖
�
單片機(jī)是整個(gè)智能循跡小車的核心 ,控制所有模塊。本系統(tǒng)采用 STC89S52,它是一種低功耗���、高性能 CMOS8 位微控制器 , 具有 8K字節(jié)在系統(tǒng)可編程FLASH存儲(chǔ)器,使用 STC公司高密度非易失性存儲(chǔ)器技術(shù)制造,與工業(yè) 80C51指令和引腳完全兼容�����。片上FLASH允許程序存儲(chǔ)器在系統(tǒng)可編程, 亦使用常規(guī)編程器�����。主控模塊如圖 2所示 ,支持上電和按鍵復(fù)位�。 1.1 電源模
6、塊
電源模塊采用了兩種供電方式,在程序調(diào)試下載階段采用了來自 PC機(jī)的 USB接口供電 ,在小車循跡行駛的時(shí)候采用 4 節(jié) 1.5V的干電池供電�。電源通過 7805 穩(wěn)壓塊穩(wěn)壓, 470μF和 104電容進(jìn)行濾波,如圖 3所示。 1.2 紅外檢測(cè)模塊
紅外檢測(cè)采用了 TCRT5000, 在車后部靠近后輪處安裝兩對(duì) TCRT5000紅外對(duì)管 , 與路面距離控制在12mm左右���。 TCRT5000測(cè)試電路如圖 4所示 ��。
黑線檢測(cè)原理是紅外發(fā)射管發(fā)射光線到路面 ,紅外光遇到白底則被反射,接收管接收到反射光 ,經(jīng)施密特觸發(fā)器整形后輸出低電平;當(dāng)紅外光遇到黑線時(shí)則被吸收,接收管沒有接收
7�����、到反射光,經(jīng)施密特觸發(fā)器整形后輸出高電平��。紅外檢測(cè)模塊電路原理如圖 5所示����。
收稿日期:2010 -09
作者簡(jiǎn)介:黃春平(1981— ),男, 講師, 碩士, 主要從事智能儀器的研究和教學(xué)工作�。
2011年第 2期
儀 表 技 術(shù)
· 55·
1.3 直流電機(jī)驅(qū)動(dòng)模塊
TTL邏輯電平信號(hào), 可驅(qū)動(dòng) 36V、2A以下的電機(jī)�����。
兩個(gè)后輪采用 L293D驅(qū)動(dòng)的直流電機(jī)帶動(dòng)��。
L293D可驅(qū)動(dòng)兩個(gè)電機(jī) , 3��、6和 11���、14腳之間分別接 2
L293D是驅(qū)動(dòng)二相和四相直流電機(jī)的專用芯片, 內(nèi)含
個(gè)電機(jī)��。 2���、7、10����、15腳接輸入
8、控制電平 , 控制電機(jī)的
兩個(gè) H橋的高電壓大電流雙全橋式驅(qū)動(dòng)器, 接收標(biāo)準(zhǔn)
正反轉(zhuǎn) , EN1��、EN2接控制使能端 , 控制電機(jī)的停轉(zhuǎn) ,
圖 2 主控模塊
圖 5 紅外檢測(cè)模塊
圖 3 電源模塊
L293D的邏輯功能如表 1所示 ����。單片機(jī)通過輸出二組PWM波來控制電機(jī)的正反轉(zhuǎn) ?�?刂品椒ㄅc控制電路都比較簡(jiǎn)單 , 2��、7 腳控制第一個(gè)電機(jī)的方向, 輸入的EN1控制第一個(gè)電機(jī)
9�、的速度 ;10, 15腳控制第二個(gè)電機(jī)的方向 ,輸入的 EN2 控制第二個(gè)電機(jī)的速度 , 直流電機(jī)驅(qū)動(dòng)電路如圖 6所示�。
圖 4 TCRT5000測(cè)試電路
· 56· 儀 表 技術(shù) 2011年第 2期
圖 6 直流電機(jī)驅(qū)動(dòng)電路
表 1 L293D邏輯功能
EN1(2)
IN1(IN3)
IN2(IN4)
電機(jī)運(yùn)轉(zhuǎn)情況
H
H
H
前進(jìn)
H
L
L
后退
H
H
L
左轉(zhuǎn)
H
L
H
右轉(zhuǎn)
10���、
2 軟件設(shè)計(jì)
圖 7給出的是主程序流程圖 �。程序啟動(dòng)后檢測(cè)光電傳感器 1, 2, 如遇白線, 則前進(jìn) ;如都遇黑線, 則后退 ;如果光電傳感器 1 遇黑線 ,傳感器 2遇白線, 則左
轉(zhuǎn) ;如果光電傳感器 1 遇白線 ,傳感器 2遇黑線, 則右
轉(zhuǎn) �。程序主要采用 switch, case語句,控制簡(jiǎn)單實(shí)用。
圖 7 軟件流程圖
3 結(jié)論
智能循跡小車采用了 51單片機(jī)為控制核心 ,因?yàn)樵搯纹瑱C(jī)的穩(wěn)定性較好, 性價(jià)比較高����。黑線的循跡采用了紅外發(fā)射對(duì)管 TCRT
11、5000, 并通過施密特觸發(fā)器整形, 抗干擾能力較強(qiáng), 采用的技術(shù)主要有 :通過編程
�
來控制小車的速度;紅外對(duì)管光電傳感器的有效應(yīng)用;直流驅(qū)動(dòng)芯片的可靠運(yùn)用��。
參考文獻(xiàn):
[ 1] 張拓, 戴亞文.基于 AT89S52單片機(jī)的智能循跡機(jī)器人設(shè)
計(jì) [ J] .機(jī)電工程技術(shù), 2009(1):13 -15.
[ 2] 孫涵芳.MCS51/96 系列單片機(jī)原理與應(yīng)用[ M] .北京:北
京航空航天大學(xué)出版社, 1999.
[ 3] 王文華.基于 80C51單片機(jī)的智能小車設(shè)計(jì)[ J] .山西電子
技術(shù), 2010(4):9 -10.
[
12�����、4] 吳凌燕, 唐金元, 蘇建元, 等.基于 AT89C52的實(shí)驗(yàn)室監(jiān)控系統(tǒng)設(shè)計(jì)[ J] .儀表技術(shù), 2009(2):3 -5.
(丁云編發(fā))
(上接第 53頁 )
(3)
3
(2)
(2)
(k)] (20)
x2
(k)=∑ [ w21lix1i (k)+w2lix2i
i=1
式中:l=1 為輸出層節(jié)點(diǎn)數(shù) , 上角標(biāo) (1)�、(2)、(3)分別代表輸入層�����、隱含層和輸出層, w12li和 w21li分別為第二個(gè)網(wǎng)絡(luò)對(duì)第一個(gè)網(wǎng)絡(luò)的作用權(quán)值及第一個(gè)網(wǎng)絡(luò)對(duì)第二個(gè)網(wǎng)絡(luò)的作用權(quán)值�����。相應(yīng)的算法在文獻(xiàn) [ 3]中有詳細(xì)地介紹�。
3 結(jié)語
13、本文以中央空調(diào)系統(tǒng)為被控對(duì)象 ,研究了 PID神經(jīng)網(wǎng)絡(luò)算法在中央空調(diào)溫濕度控制中的應(yīng)用���。對(duì)單神經(jīng)元 PID控制器進(jìn)行了 SIMULINK仿真, 仿真結(jié)果表明單神經(jīng)元 PID控制器控制效果顯著 , 達(dá)到了系統(tǒng)的精度要求,但是對(duì)溫濕度控制中存在的耦合問題解決效果不明顯 ,因此在本文最后介紹了一種新的解耦控制器:三層前向 PID神經(jīng)網(wǎng)絡(luò)解耦控制器��。從理論上該種控制器考慮到了溫度控制和濕度控制間的耦合問題 ,溫度及濕度不再是單獨(dú)控制 ,在三層神經(jīng)網(wǎng)絡(luò)的隱含層有相互的交叉,在學(xué)習(xí)時(shí)能有效考慮互相的影響�。接下來控制器模型的建立及算法的改進(jìn)還需進(jìn)一步地研究�。
參考文獻(xiàn):
[ 1] 曾軍, 方厚輝.神經(jīng)網(wǎng)絡(luò) PID控制及其 Matlab仿真 [ J] .現(xiàn)
代電子技術(shù), 2004(169):51 -52.
[ 2] 張世韜, 楊風(fēng), 郝騫.單神經(jīng)元 PID控制器研究及仿真[ J] .
機(jī)械工程與自動(dòng)化, 2009(3):69 -70.
[ 3] 任建偉, 黃宏麗.神經(jīng)網(wǎng)絡(luò) PID控制系統(tǒng)的研究 [ D] .大
慶 :大慶石油學(xué)院, 2003.
[ 4] 王鋮, 沙立民, 高尚飛.基于多變量單神經(jīng)元 PID控制的溫濕度控制系統(tǒng)研究[ D] .上海:上海大學(xué), 2010.
(丁云編發(fā))
 基于51單片機(jī)的智能循跡小車的設(shè)計(jì)-基于51單片機(jī)的智能循跡小車的設(shè)計(jì)(共6頁)
基于51單片機(jī)的智能循跡小車的設(shè)計(jì)-基于51單片機(jī)的智能循跡小車的設(shè)計(jì)(共6頁)