《《直流電機(jī)調(diào)速》PPT課件》由會(huì)員分享�,可在線閱讀�,更多相關(guān)《《直流電機(jī)調(diào)速》PPT課件(78頁(yè)珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索�。
1�、直流電機(jī)及調(diào)速系統(tǒng) n n 從圖中可以看出�,接入直流電源以后,電刷A為正極性�,電刷B為負(fù)極性。電流從正電刷A經(jīng)線圈ab�、cd,到負(fù)電刷B流出�。根據(jù)電磁力定律,在載流導(dǎo)體與磁力線垂直的條件下�,線圈每一個(gè)有效邊將受到一電磁力的作用。電磁力的方向可用左手定則判斷�,伸開左手,掌心向著N極�,4指指向電流的方向�,與4指垂直的拇指方向就是電磁力的方向�。在圖示瞬間,導(dǎo)線ab與dc中所受的電磁力為逆時(shí)針?lè)较?,在這個(gè)電磁力的作用下,轉(zhuǎn)子將逆時(shí)針旋轉(zhuǎn)即圖中S的方向�。直流電機(jī)工作原理 n 隨著轉(zhuǎn)子的轉(zhuǎn)動(dòng),線圈邊位置互換�,這時(shí)要使轉(zhuǎn)子連續(xù)轉(zhuǎn)動(dòng)則應(yīng)使線圈邊中的電流方向也加以改變要進(jìn)行換向。由于換向器與靜止電刷的相互配合作
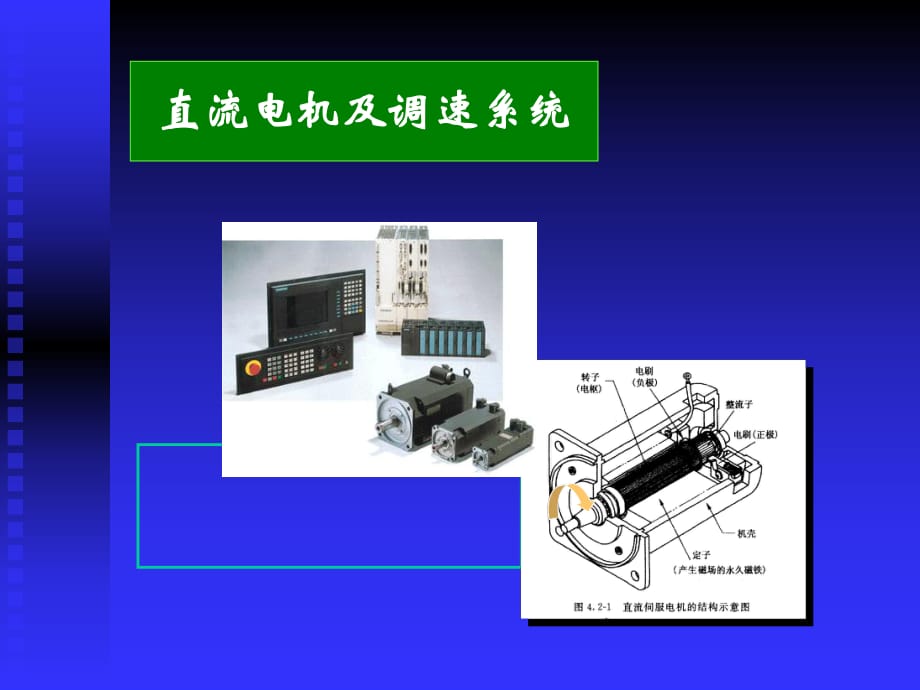
2�、用,線圈不論轉(zhuǎn)到何處�,B刷h始終與運(yùn)動(dòng)到N極下的線圈邊相接觸,而電極A始終與運(yùn)動(dòng)到S極下的線圈邊相接觸這就保證了電流總是經(jīng)電刷經(jīng)N極下導(dǎo)體流入�,再沿S極導(dǎo)體經(jīng)電刷B流出。因而電磁力和電磁轉(zhuǎn)矩的方向始終保持不變�,使電機(jī)沿逆時(shí)針?lè)较蜻B續(xù)轉(zhuǎn)動(dòng)。n 直流電機(jī)工作原理 電磁式直流電機(jī)的種類 電磁式直流電機(jī)的種類 永磁式直流伺服電機(jī)結(jié)構(gòu) n直流伺服電機(jī)構(gòu)成n直流伺服電機(jī)的電源特點(diǎn)n直流伺服電機(jī)的類型 直流電機(jī)的基本方程_1靜態(tài)方程 n靜態(tài)方程是指電機(jī)穩(wěn)態(tài)下的機(jī)械平衡方程�,電壓平衡方程。Ia 直流電機(jī)的基本方程_1動(dòng)態(tài)方程 n過(guò)渡狀態(tài) 停止/啟動(dòng)�、加速、減速�、加載、減載I 直流電機(jī)的基本方程_1動(dòng)態(tài)方程 n
3�、過(guò)渡狀態(tài) 停止/啟動(dòng)、加速�、減速�、加載�、減載I(t) 直流電機(jī)的基本方程_2電流 直流電機(jī)的調(diào)速原理電壓調(diào)速 直流電機(jī)的速度控制原理_1機(jī)械特性方程的推導(dǎo)Ia 直流電機(jī)的基本特性_1理想轉(zhuǎn)速轉(zhuǎn)速降Ia n K值的大小反映了什么?n KM 也被稱為轉(zhuǎn)速降n�,其物理意義是負(fù)栽對(duì)轉(zhuǎn)速的影響機(jī)械特性曲線 直流伺服電機(jī)的基本特性_2啟動(dòng)電壓?jiǎn)?dòng)電壓的物理意義?啟動(dòng)特性曲線 電機(jī)調(diào)速基本概念恒功率調(diào)速nM nP 電機(jī)調(diào)速基本概念恒轉(zhuǎn)矩調(diào)速nM nP 電機(jī)調(diào)速基本概念調(diào)速范圍額定轉(zhuǎn)速在額定電壓�,額定負(fù)載條件下(電機(jī)銘牌上所給出的數(shù)據(jù)) 電機(jī)調(diào)速基本概念調(diào)速范圍靜差度額定轉(zhuǎn)速在額定電壓,額定負(fù)載條件下(電機(jī)銘
4�、牌上所給出的數(shù)據(jù)) 電機(jī)調(diào)速基本概念調(diào)速范圍靜差度由靜差度許可值求調(diào)速范圍額定轉(zhuǎn)速在額定電壓,額定負(fù)載條件下(電機(jī)銘牌上所給出的數(shù)據(jù)) 直流電機(jī)的基本特性_1理想轉(zhuǎn)速轉(zhuǎn)速降IaIa n普通直流電機(jī)的銘牌數(shù)據(jù)n額定工作轉(zhuǎn)速n額定工作轉(zhuǎn)矩n額定工作電壓n額定工作電流 n電機(jī)線圈直流內(nèi)阻 電機(jī)調(diào)速基本概念理想轉(zhuǎn)速轉(zhuǎn)速降Ia 直流電機(jī)的控制方法單片機(jī)工業(yè)PC可編程控制器 電機(jī)調(diào)速系統(tǒng)的作用 直流電機(jī)調(diào)速系統(tǒng)n開環(huán)調(diào)速系統(tǒng)電機(jī)調(diào)速系統(tǒng)的基本結(jié)構(gòu)_1控制驅(qū)動(dòng)電機(jī)機(jī)械速度控制 直流電機(jī)調(diào)速系統(tǒng)n速度負(fù)反饋閉環(huán)調(diào)速系統(tǒng)(半閉環(huán))電機(jī)調(diào)速系統(tǒng)的基本結(jié)構(gòu)_2控制驅(qū)動(dòng)電機(jī)機(jī)械測(cè)量速度控制 直流伺服電機(jī)控制系統(tǒng)n速度
5�、負(fù)反饋閉環(huán)調(diào)速系統(tǒng)的結(jié)構(gòu)速度負(fù)反饋閉環(huán)調(diào)速系統(tǒng)電機(jī)調(diào)速系統(tǒng)實(shí)例_1 (A)控制驅(qū)動(dòng)電源電源電機(jī) 直流電機(jī)調(diào)速系統(tǒng)n速度負(fù)反饋閉環(huán)調(diào)速系統(tǒng)(閉環(huán))電機(jī)調(diào)速系統(tǒng)的基本結(jié)構(gòu)_3控制驅(qū)動(dòng)電機(jī)機(jī)械測(cè)量速度控制 直流伺服電機(jī)控制系統(tǒng)n速度負(fù)反饋閉環(huán)控制系統(tǒng)的結(jié)構(gòu)n位置速度雙閉環(huán)控制系統(tǒng)的結(jié)構(gòu)電機(jī)調(diào)速系統(tǒng)的基本結(jié)構(gòu)_4控制1控制2驅(qū)動(dòng)測(cè)量1電機(jī)機(jī)械測(cè)量2位置控制 電機(jī)調(diào)速系統(tǒng)實(shí)例_2驅(qū)動(dòng)系統(tǒng)伺服電機(jī)CNC系統(tǒng) 機(jī)床本體傳感器CNC中的伺服系統(tǒng) 系統(tǒng)實(shí)例數(shù)控系統(tǒng)+驅(qū)動(dòng)單元+伺服電機(jī) 系統(tǒng)實(shí)例 設(shè)計(jì)條件n最大縱向進(jìn)給力n工作臺(tái)質(zhì)量n工件等質(zhì)量n定位精度n導(dǎo)軌形式及材料伺服系統(tǒng)設(shè)計(jì)實(shí)例_1設(shè)計(jì)條件轉(zhuǎn)化成分析條件n
6、�?n?n�?n?n�? 伺服系統(tǒng)設(shè)計(jì)實(shí)例_分析1驅(qū)動(dòng)單元數(shù)學(xué)模型電機(jī)單元數(shù)學(xué)模型機(jī)械單元數(shù)學(xué)模型目標(biāo)運(yùn)動(dòng)信號(hào) 伺服系統(tǒng)設(shè)計(jì)實(shí)例_分析2驅(qū)動(dòng)單元數(shù)學(xué)模型電機(jī)單元數(shù)學(xué)模型機(jī)械單元數(shù)學(xué)模型目標(biāo)運(yùn)動(dòng)信號(hào) 伺服系統(tǒng)設(shè)計(jì)實(shí)例_分析3驅(qū)動(dòng)單元數(shù)學(xué)模型電機(jī)單元數(shù)學(xué)模型機(jī)械單元數(shù)學(xué)模型目標(biāo)運(yùn)動(dòng)信號(hào)輸入輸出輸入輸出輸入 輸出信號(hào) 電機(jī)調(diào)速系統(tǒng)的一般結(jié)構(gòu)形式 直流伺服電機(jī)控制系統(tǒng)n速度負(fù)反饋閉環(huán)調(diào)速系統(tǒng)的結(jié)構(gòu)速度負(fù)反饋閉環(huán)調(diào)速系統(tǒng)電機(jī)調(diào)速系統(tǒng)實(shí)例_1 (A)控制驅(qū)動(dòng)電源電源電機(jī) 直流伺服電機(jī)控制系統(tǒng)n速度負(fù)反饋閉環(huán)調(diào)速系統(tǒng)的結(jié)構(gòu)電機(jī)調(diào)速系統(tǒng)實(shí)例_1 (B) 直流伺服電機(jī)控制系統(tǒng)n速度負(fù)反饋閉環(huán)調(diào)速系統(tǒng)的結(jié)構(gòu)電機(jī)調(diào)速系統(tǒng)
7�、實(shí)例_1 (C) 電機(jī)調(diào)速系統(tǒng)實(shí)例_1 (D)控制驅(qū)動(dòng)電源電源 電機(jī) 電機(jī)調(diào)速系統(tǒng)實(shí)例_1 (E)控制驅(qū)動(dòng)電源電源 電機(jī) 電機(jī)調(diào)速系統(tǒng)實(shí)例_1 (F)驅(qū)動(dòng)電源電源 電機(jī)控制 電機(jī)調(diào)速系統(tǒng)實(shí)例_1 (G) 控制 電機(jī)調(diào)速系統(tǒng)實(shí)例_1 (H) 控制位置控制實(shí)現(xiàn)原理 電機(jī)調(diào)速系統(tǒng)實(shí)例_1 總結(jié) 直流伺服電機(jī)調(diào)速驅(qū)動(dòng)單元結(jié)構(gòu)實(shí)例 直流伺服電機(jī)調(diào)速驅(qū)動(dòng)單元結(jié)構(gòu)實(shí)例速度指令測(cè)速電機(jī)電機(jī) 直流伺服電機(jī)調(diào)速驅(qū)動(dòng)單元結(jié)構(gòu)實(shí)例速度指令測(cè)速電機(jī)速度單元電機(jī) 直流伺服電機(jī)調(diào)速驅(qū)動(dòng)單元結(jié)構(gòu)實(shí)例速度環(huán)速度指令測(cè)速電機(jī)電機(jī) 直流伺服電機(jī)調(diào)速驅(qū)動(dòng)單元結(jié)構(gòu)實(shí)例電流環(huán)速度環(huán)電壓脈沖變換速度指令測(cè)速電機(jī)電機(jī) 直流伺服電機(jī)調(diào)速驅(qū)動(dòng)單
8、元結(jié)構(gòu)實(shí)例電流環(huán)速度環(huán)電壓脈沖變換速度指令測(cè)速電機(jī)電機(jī) n n 系統(tǒng)的穩(wěn)態(tài)設(shè)計(jì)也要分步驟進(jìn)行�,首先要根據(jù)被控對(duì)象運(yùn)動(dòng)的特點(diǎn),選擇系統(tǒng)的執(zhí)行電機(jī)和相應(yīng)的機(jī)械傳動(dòng)機(jī)構(gòu)�;接著可以選擇或設(shè)計(jì)驅(qū)動(dòng)執(zhí)行電機(jī)的功率放大裝置;再根據(jù)系統(tǒng)工作精度的要求�,確定檢測(cè)裝置具體的組成形式,選擇元件的型號(hào)規(guī)格�,設(shè)計(jì)具體的線路參數(shù)�。然后根據(jù)已確定的執(zhí)行電機(jī)�、功率放大裝置和檢測(cè)整置,設(shè)計(jì)前置放大器�、信號(hào)轉(zhuǎn)換線路等。在考慮各種部件相互聯(lián)接時(shí)�,要注意阻抗的匹配、飽和界限�、分辨率、供電方式和接地方式�。為使有用信號(hào)不失真的、不失精度地有效傳遞�,耍設(shè)計(jì)好福合方式。同時(shí)也要考慮必要的屏蔽�、保護(hù)、濾波等抗干擾措施�。 n建立系統(tǒng)的動(dòng)態(tài)數(shù)學(xué)模型n 經(jīng)過(guò)系統(tǒng)的穩(wěn)態(tài)設(shè)計(jì),系統(tǒng)主回路各部分均己確定�。但穩(wěn)態(tài)設(shè)計(jì)依據(jù)的主要是系統(tǒng)的穩(wěn)態(tài)性能指標(biāo),因此所構(gòu)成的系統(tǒng)還不能保證滿足系統(tǒng)動(dòng)態(tài)性能的要求�,為系統(tǒng)的動(dòng)態(tài)設(shè)汁作準(zhǔn)備,需要對(duì)穩(wěn)態(tài)設(shè)計(jì)所確定的系統(tǒng)作定量計(jì)算(或輔助實(shí)驗(yàn)測(cè)試)�,建立它的動(dòng)態(tài)數(shù)學(xué)模型,稱之為原始系統(tǒng)的數(shù)學(xué)模型�。 直流電機(jī)轉(zhuǎn)速負(fù)反饋閉環(huán)控制系統(tǒng)分析 系統(tǒng)結(jié)構(gòu)模型 電機(jī)建模 換流裝置建模 放大器建模 測(cè)量傳感器建模 系統(tǒng)綜合建模 閉環(huán)系統(tǒng)與開環(huán)系統(tǒng)比較 開環(huán)系統(tǒng)穩(wěn)態(tài)方程 閉環(huán)系統(tǒng)穩(wěn)態(tài)方程 系統(tǒng)性能改善的分析式 系統(tǒng)性能改善的分析式 系統(tǒng)性能改善的分析式
 《直流電機(jī)調(diào)速》PPT課件
《直流電機(jī)調(diào)速》PPT課件