《六自由度大負(fù)載搬運(yùn)機(jī)器人設(shè)計(jì)任務(wù)書》由會(huì)員分享,可在線閱讀,更多相關(guān)《六自由度大負(fù)載搬運(yùn)機(jī)器人設(shè)計(jì)任務(wù)書(3頁珍藏版)》請?jiān)谘b配圖網(wǎng)上搜索���。
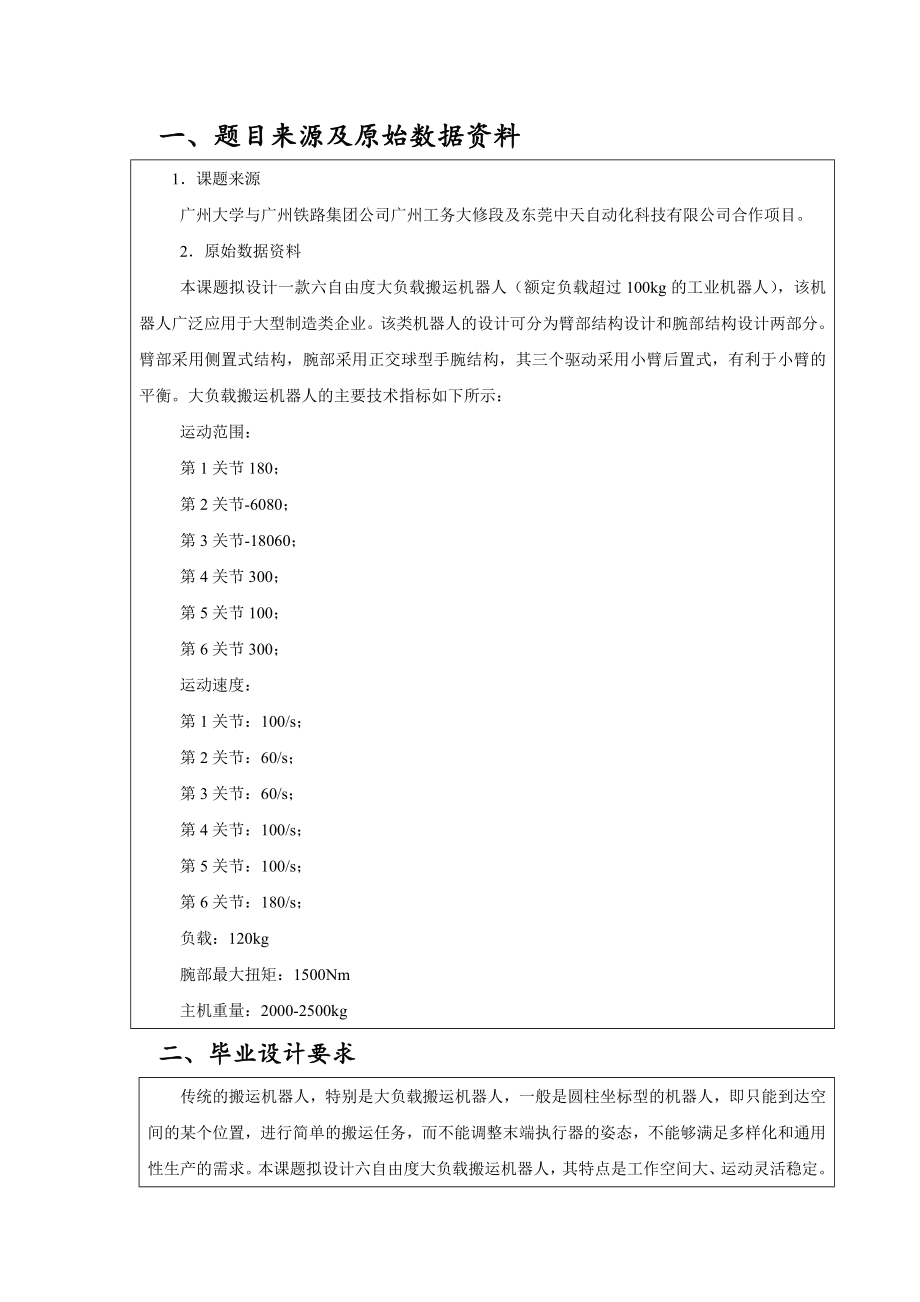
1���、一、題目來源及原始數(shù)據(jù)資料 1課題來源 廣州大學(xué)與廣州鐵路集團(tuán)公司廣州工務(wù)大修段及東莞中天自動(dòng)化科技有限公司合作項(xiàng)目���。 2原始數(shù)據(jù)資料 本課題擬設(shè)計(jì)一款六自由度大負(fù)載搬運(yùn)機(jī)器人(額定負(fù)載超過 100kg 的工業(yè)機(jī)器人)���,該機(jī)器人廣泛應(yīng)用于大型制造類企業(yè)。該類機(jī)器人的設(shè)計(jì)可分為臂部結(jié)構(gòu)設(shè)計(jì)和腕部結(jié)構(gòu)設(shè)計(jì)兩部分���。臂部采用側(cè)置式結(jié)構(gòu)���,腕部采用正交球型手腕結(jié)構(gòu),其三個(gè)驅(qū)動(dòng)采用小臂后置式���,有利于小臂的平衡���。大負(fù)載搬運(yùn)機(jī)器人的主要技術(shù)指標(biāo)如下所示: 運(yùn)動(dòng)范圍: 第 1 關(guān)節(jié) 180; 第 2 關(guān)節(jié) -6080���; 第 3 關(guān)節(jié) -18060���; 第 4 關(guān)節(jié) 300���; 第 5 關(guān)節(jié) 100; 第 6 關(guān)節(jié) 3
2���、00���; 運(yùn)動(dòng)速度: 第 1 關(guān)節(jié): 100/s���; 第 2 關(guān)節(jié): 60/s���; 第 3 關(guān)節(jié): 60/s; 第 4 關(guān)節(jié): 100/s���; 第 5 關(guān)節(jié): 100/s���; 第 6 關(guān)節(jié): 180/s; 負(fù)載: 120kg 腕部最大扭矩: 1500Nm 主機(jī)重量: 2000-2500kg 二���、畢業(yè)設(shè)計(jì)要求 傳統(tǒng)的搬運(yùn)機(jī)器人���,特別是大負(fù)載搬運(yùn)機(jī)器人���,一般是圓柱坐標(biāo)型的機(jī)器人,即只能到達(dá)空間的某個(gè)位置���,進(jìn)行簡單的搬運(yùn)任務(wù)���,而不能調(diào)整末端執(zhí)行器的姿態(tài),不能夠滿足多樣化和 通用性生產(chǎn)的需求���。本課題擬設(shè)計(jì)六自由度大負(fù)載搬運(yùn)機(jī)器人���,其特點(diǎn)是工作空間大、運(yùn)動(dòng)靈活穩(wěn)定���。與一般輕負(fù)載機(jī)器人相比���,大負(fù)載機(jī)器人的手腕結(jié)構(gòu)、
3���、臂部結(jié)構(gòu)和整體平衡方面都有其特殊的設(shè)計(jì)���。 本課題擬設(shè)計(jì)一款六自由度大負(fù)載搬運(yùn)機(jī)器人���,主要工作內(nèi)容包括: 1、分析六自由度關(guān)節(jié)機(jī)器人的工作原理���,對機(jī)器人進(jìn)行機(jī)構(gòu)分析���,建立其運(yùn)動(dòng)學(xué)模型; 2���、確定總體設(shè)計(jì)方案���,選擇機(jī)器人臂部結(jié)構(gòu)及三自由度手腕的傳動(dòng)結(jié)構(gòu)和布置方案���。 3���、按照技術(shù)指標(biāo)進(jìn)行伺服系統(tǒng)、減速器等部件的選型���; 4���、對機(jī)器人結(jié)構(gòu)進(jìn)行詳細(xì)設(shè)計(jì)���,建立三維 CAD 模型; 5���、 CAD 模型的完善與修改���,生成工程圖; 6���、最終提交: (1) 不少于 15000 字的設(shè)計(jì)說明書���;畢業(yè)設(shè)計(jì)說明書應(yīng)闡述整個(gè)畢業(yè)設(shè)計(jì)內(nèi)容,要突出重點(diǎn)和特色���,圖文并茂���,文字通暢。應(yīng)有目錄���、中英文摘要及關(guān)鍵詞���、正文���、參考文獻(xiàn)等內(nèi)
4、容���,符合廣州大學(xué)普通全日制本科生畢業(yè)論文(設(shè)計(jì))規(guī)范化規(guī)定���。 (2) 機(jī)器人 CAD 模型,制作搬運(yùn)機(jī)器人作業(yè)運(yùn)動(dòng)動(dòng)畫���,并能在答辯時(shí)演示���。 (3) 工程設(shè)計(jì)圖工作量不少于 3 張 A0(其中至少有 1張 A0 圖),包括機(jī)械系統(tǒng)裝配圖���、部件圖、主要零件圖等���。 三���、進(jìn)度安排���、應(yīng)完成的工作量 寒假期間:結(jié)合設(shè)計(jì)目標(biāo),查閱資料和學(xué)習(xí)���,掌握六自由度關(guān)節(jié)機(jī)器人機(jī)構(gòu)原理���,至少閱讀8 篇以上的相關(guān)文獻(xiàn)資料。 第 1-2 周:整理文獻(xiàn)���,撰寫六自由度搬運(yùn)機(jī)器人概述���;構(gòu)建 6 自由度關(guān)節(jié)機(jī)器人數(shù)學(xué)模型;同時(shí)填報(bào)開題報(bào)告���。 第 3 周:擬定總體設(shè)計(jì)方案���,確定臂部結(jié)構(gòu)及三自由度手腕的傳動(dòng)結(jié)構(gòu)和布置方案。 第 3-6
5���、周:詳細(xì)結(jié)構(gòu)設(shè)計(jì)���,建立 CAD 三維模型���;對腕部傳動(dòng)部分結(jié)構(gòu)進(jìn)行詳細(xì)設(shè)計(jì); 第 7-8 周:搬運(yùn)機(jī)器人結(jié)構(gòu)優(yōu)化���,對 CAD 模型進(jìn)行完善和修改���,并制作動(dòng)畫。同時(shí)整理并撰寫設(shè)計(jì)書或論文���。 第 9 周:完善論文���,并檢查論文初稿, 指導(dǎo)學(xué)生有針對性地修改���。 第 10 周:修改論文���,在系統(tǒng)上上傳畢業(yè)設(shè)計(jì)論文定稿。 第 11 周:根據(jù)修改意見繼續(xù)完善畢業(yè)設(shè)計(jì)和論文���。 第 12 周:評閱老師檢查評閱論文���,將發(fā)現(xiàn)的問題反饋給學(xué)生,指導(dǎo)學(xué)生修改論文直到符合要求���。 第 13 周:學(xué)校畢業(yè)論文抄襲行為的檢測���。學(xué)生在規(guī)定時(shí)間內(nèi)上傳已定稿的畢業(yè)論文(設(shè)計(jì))進(jìn)行抄襲檢查。 第 14 周:在答辯前 3 天按照學(xué)校要求的統(tǒng)
6���、一格式完成論文的整理���、修訂和打印。準(zhǔn)備 10分鐘 PPT���,參加學(xué)校公開答辯或?qū)W院答辯���。 第 15 周:針對答辯中發(fā)現(xiàn)的問題完善畢業(yè)設(shè)計(jì),最終提交論文等資料���。 四���、主要參考文獻(xiàn) 1 克來格 (Craig,J.J). 機(jī)器人學(xué)導(dǎo)論 (原書第三版 )M. 北京 : 機(jī)械工業(yè)出版社 , 2006. 2 熊有倫 . 機(jī)器人技術(shù)基礎(chǔ) M. 武漢 : 華中科技大學(xué)出版社 , 1996. 3 蔡自興 . 機(jī)器人學(xué) M. 北京 : 清華大學(xué)出版社 , 2009. 4 于殿勇 , 李瑞峰等 . 120kg 負(fù)載工業(yè)機(jī)器人的開發(fā) J. 高技術(shù)通訊 , 2002, 12 (6): 79-82. 5 江洪 , 陸利鋒
7���、, 魏崢等 . SolidWorks 動(dòng)畫演示與運(yùn)動(dòng)分析實(shí)例解析 M. 北京 : 機(jī)械工業(yè)出版社 , 2006. 6 侯祥明 , 張立祥 . 基于 Solidworks 下 cosmosmotion 六自由度焊接機(jī)器人三維運(yùn)動(dòng)模擬J. 煤礦機(jī)械 , 2007, 28 (9): 95-97. 7 李力行 , 何衛(wèi)東 . 機(jī)器人用高精度 RV 傳動(dòng)研究 J. 中國機(jī)械工程 , 1999, 10 (9): 1001-1002. 8 王戰(zhàn)中 , 張大衛(wèi) , 韓鴻志等 . 連續(xù) 3R斜交非球型乎腕的設(shè)計(jì)與運(yùn)動(dòng)學(xué)分析 J. 天津大學(xué)學(xué)報(bào) , 2008, 41 (1): 103-108. 9 陳愛珍 . 日本工業(yè)機(jī)器人的發(fā)展歷史及現(xiàn)狀 J. 機(jī)械工程師 , 2008, 7: 8-10. 指導(dǎo)教師(簽名): 系(教研室)主任(簽名): 主管院長(簽名): (學(xué)院章)
 六自由度大負(fù)載搬運(yùn)機(jī)器人設(shè)計(jì)任務(wù)書
六自由度大負(fù)載搬運(yùn)機(jī)器人設(shè)計(jì)任務(wù)書